



Exact Reverb via Transfer-Function Modeling
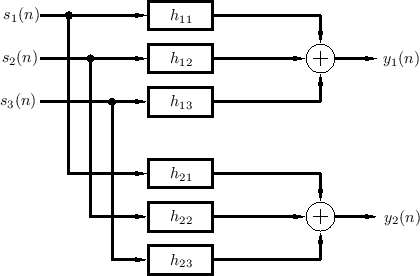
Figure 3.1 depicts the general reverberation scenario for three sources and one listener (two ears). In general, the filters should also include filtering by the pinnae of the ears, so that each echo can be perceived as coming from the correct angle of arrival in 3D space; in other words, at least some reverberant reflections should be spatialized so that they appear to come from their natural directions in 3D space [248]. Again, the filters change if anything changes in the listening space, including source or listener position. The artificial reverberation problem is then to implement some approximation of the system in Fig.3.1.
 |
In the frequency domain, it is convenient to express the input-output relationship in terms of the transfer-function matrix:
![$\displaystyle \left[\begin{array}{c} Y_1(z) \\ [2pt] Y_2(z) \end{array}\right] ...
...left[\begin{array}{c} S_1(z) \\ [2pt] S_2(z) \\ [2pt] S_3(z)\end{array}\right]
$](http://www.dsprelated.com/josimages_new/pasp/img663.png)
Denoting the impulse response of the filter from source ![]() to ear
to ear ![]() by
by ![]() , the two output signals in Fig.3.1 are computed by
six convolutions:
, the two output signals in Fig.3.1 are computed by
six convolutions:

Next Section:
Complexity of Exact Reverberation
Previous Section:
Digital Waveguide Networks







