



Delay-Line Interpolation Summary
The most commonly used closed-form methods for delay-line interpolation may be summarized by the following table:
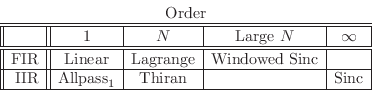
In the second column -- ![]() th-order interpolation -- we list
Lagrange for the FIR case (top) and Thiran for the IIR case (bottom),
and these are introduced in §4.2 and §4.3,
respectively. Lagrange and Thiran interpolators, properly
implemented, enjoy the following advantages:
th-order interpolation -- we list
Lagrange for the FIR case (top) and Thiran for the IIR case (bottom),
and these are introduced in §4.2 and §4.3,
respectively. Lagrange and Thiran interpolators, properly
implemented, enjoy the following advantages:
- Gain bounded by 1 at all frequencies
- Coefficients known in closed form as a function of desired delay
- Maximally flat at low frequencies:
- -
- Lagrange: maximally flat frequency response at dc
- -
- Thiran: maximally flat group delay at dc
In the high-order FIR case, one should also consider ``windowed sinc'' interpolation (introduced in §4.4) as an alternative to Lagrange interpolation. In fact, as discussed in §4.2.16, Lagrange interpolation is a special case of windowed-sinc interpolation in which a scaled binomial window is used. By choosing different windows, optimalities other than ``maximally flat at dc'' can be achieved.
In the most general ![]() th-order case, the interpolation-filter impulse
response may be designed to achieve any optimality objective, such as
Chebyshev optimality (Fig.4.11). That is, design a digital filter
(FIR or IIR) that approximates
th-order case, the interpolation-filter impulse
response may be designed to achieve any optimality objective, such as
Chebyshev optimality (Fig.4.11). That is, design a digital filter
(FIR or IIR) that approximates
FIR interpolators have the advantage that they can be used in ``random access'' mode. IIR interpolators, on the other hand, require a sequential stream of input samples and produce a sequential stream of interpolated signal samples (typically implementing a fractional delay). In IIR fractional-delay filters, the fractional delay must change slowly relative to the IIR duration.
Finally, we note in the last column of the above table that if ``order
is no object'' (
![]() ), then the ideal bandlimited-interpolator
impulse-response is simply a sampled
sinc function, as discussed in
§4.4.
), then the ideal bandlimited-interpolator
impulse-response is simply a sampled
sinc function, as discussed in
§4.4.
Next Section:
Variable Delay Lines
Previous Section:
Windowed Sinc Interpolation







