



Delay estimation by FFT

Code snippet
This article relates to the Matlab / Octave code snippet: Delay estimation with subsample resolution
It explains the algorithm and the design decisions behind it.
Introduction
There are many DSP-related problems, where an unknown timing between two signals needs to be determined and corrected, for example, radar, sonar, time-domain reflectometry, angle-of-arrival estimation, to name a few. It is not difficult to find solutions in the literature - a good starting point is for example the list of references in [1] - but for some reason things are never as easy in the lab as they look on paper.
This article describes an algorithm that has served me well in the past. It can cope with relatively long signals (millions of samples), works regardless of the absolute delay, positive or negative and is relatively robust, accurate and fast.
For example, it can be used to line up baseband signals that represent input and output of a power amplifier, to extract distortion characteristics by coherent processing.
Use cases, advantages and disadvantages
- Use as general-purpose tool for simulations and measurements to align input and output samples
- For example: It has been used extensively for wide-band radio frequency measurements, which require very accurate input-/output alignment.
- Notuseful for real-time applications. The whole signal needs to be known in advance.
- Notrecommended for hardware or embedded implementation. Use a specialized method and optimize for the signal in question.
- Meant as a robust lab tool that (usually) does what it's supposed to do without need for any further supervision.
- Properly used, the accuracy can be orders of magnitude higher than typical "ad-hoc" solutions. It sure beats lining up signals with an oscilloscope.
- Suitable for band pass (high pass) test signals, gaps in the power spectrum and narrow-band interference
- May fail as result of excessive group delay variations (see Figure 6 why).
If so, my code snippet [5] may be a more reliable but slower and less accurate alternative. - I wouldn't recommend it for timing-recovery 'homework' problems where the estimation is the main objective (if so: For some down-to-earth introduction, see [4] ).
That said, it will happily give arrival time, magnitude and carrier phase from a known preamble / pilot signal, for example to calibrate the delay in a link-level simulator.
Accuracy
In theory, any delay estimator is limited by the Cramér-Rao bound [2], which depends largely on the shape of the power spectrum and the signal-to-noise ratio. In the absence of noise and distortion - easily simulated in Matlab - numerical accuracy remains the main limiting factor, and for example nano-sample accuracy can be achieved.
No formal proof has been carried out. If needed, it is straightforward to set up an artificial example with known delay, or to compare real-world results with a "true" maximum-likelyhood estimator such as [3] (that may however be less suited for everyday use).
Background: Cyclic signals
It is assumed that input- and output signals are cyclic. In other words, the observed signal period is one cycle of a repetitive test signal where the system is in steady state, with all transients settled. If needed, this can be approximated by zero-padding the signals in the time domain to arbitrary length.
The assumption of cyclic signals is quite important, as it allows to convert freely between time- and frequency domain, and to evaluate the underlying continuous-time waveform anywhere between samples without loss of information besides arithmetic errors..
Note that the result can become heavily biased if either signal has been truncated, relative to the other one. This lies in the nature of the problem and is not related to this specific algorithm: The optimum delay is "pulled" towards the direction that maximizes the general overlap between waveforms.
Background: Delaying bandlimited signals
Delaying a signal by a fraction of a sample reveals additional points on the continuous-time equivalent waveform in the same way as an ideal reconstruction filter, as found in the definition of the Nyquist limit. Now if the signal is zero at some sampling instants, this does not automatically mean it would be also zero between samples.
All too often, delaying an abrupt step will show a lot of "ringing" - the ringing has been there all the time, but remained invisible, as long as the signal was observed only on the original sampling grid.
The first Nyquist criterion guarantees that there will be no interaction from one sample to another - but it says nothing about the times in-between.
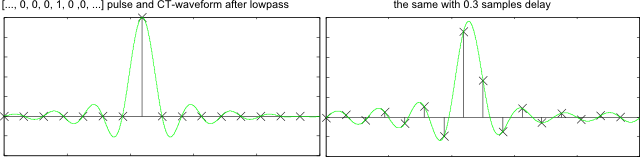
Figure 1: A pulse, its continuous-time equivalent (green) and the result of time-delaying
Algorithm
Figure 2 shows the algorithm in a nutshell:
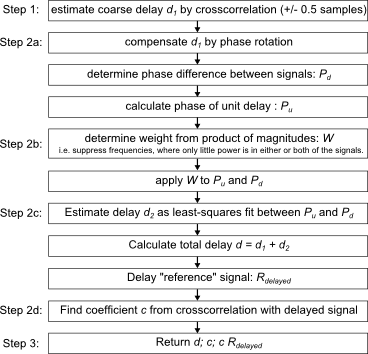
Figure 2: Overview of the algorithm
Step 1: Coarse timing estimation by crosscorrelation
A well-known solution to estimate delay is to calculate the cross-correlation between the two signals. An efficient implementation calculates |ifft(fft(a) .* fft(b)|, using FFT for cyclic convolution.
A peak in the result indicates the integer-sample delay with best alignment.
Crosscorrelation provides the coarse estimate (integerDelay) in the code snippet. Figure 3 shows an example:
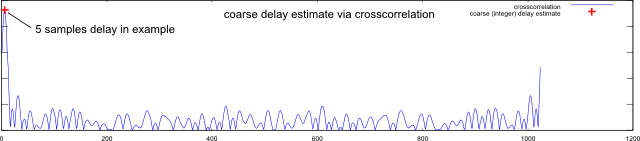
Figure 3: Coarse estimate by crosscorrelation
The coarse estimate for the delay is found by peak search. Unfortunately, most real-life delays don't fall onto an integer sampling grid.
If so, the error can be made arbitrarily small by oversampling, in other words by zero-padding fft(a) and fft(b) at the center.
There are two drawbacks:
- Timing resolution and FFT size scale proportionally, making high accuracy computationally expensive
- The correlation peak is relatively shallow, and numerical accuracy becomes a bottleneck when searching for the maximum.
Step 2: Fine estimation via slope of relative phase
Instead, delay estimation is done in the frequency domain, where a time delay results in a linearly increasing phase shift and its slope indicates the delay. The slope will be extracted by linear regression.
Phase ambiguity
A delay of one sample causes a phase shift of pi at the highest frequency: For delays greater than one sample, the phase wraps around, as only a principal value of the angle of a complex number is known. This ambiguity needs to be resolved:
Fig. 4 illustrates the relative phase between both signals over frequency, assuming a delay of several samples.
The phase wraps around, which prevents finding its slope via linear regression.
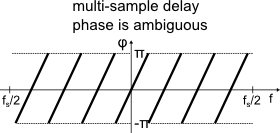
Figure 4: Relative phase between signals for multi-sample delay
Step 2a: Coarse correction
Now the coarse delay estimate (Figure 3) is removed from the signal by phase-shifting.
As long as the remaining unknown delay is less than +/- 0.5 samples, the relative phase is now confined in a +/- pi window, and no phase wrapping will occur:
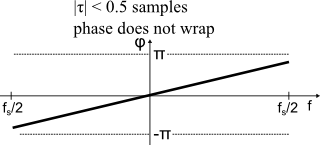
Figure 5: Relative phase between signals after coarse correction. Remaining delay is fractional-sample.
This approach will fail, if frequency-dependent group delay variations cause the phase to wrap at some frequency.
This may happen for example when dealing with a multipath radio channel: "Determining the delay" is not a well-defined problem, once the group delay varies with frequency.
In this case, phase unwrapping may be able to correct the problem, as long as it does not introduce any unwrapping errors. If necessary, set enableUnwrap = true (by default disabled).

Figure 6: Failure by wrap-around from group delay variations
When dealing with transmitters, receivers, test equipment and the like, the signal chain is usually designed with a constant group delay in mind, and the method is quite reliable. With channel models or signals on the band edge of a filter, your mileage may vary.
After coarse correction, the phase should not wrap around anymore, and linear regression will correctly determine its slope.
Step 2b: Weighted phase
At any frequency, the relative importance of the phase depends on the power of either signal: For example, the phase is meaningless both if no power is received and also if no power was transmitted (as the received signal is obviously useless in this case).
Therefore, the phase is scaled with the product of signal power at each bin.
Step 2c: Linear regression
A least-squares solution is found by projecting the phase on a basis formed by a constant term and a linear-phase term, the latter corresponding to a unit delay. As the phase has been weighted, the same weights are applied to the basis.
The resulting coefficient of the linear-phase term is the remaining delay in samples, which is summed with the coarse delay to give the final delay estimate.
Step 2d: Scaling factor
Finally, one signal is delayed by the delay estimate, and projected onto the other signal. A scaling factor c results.
Step 3: Return values
The function returns the delay estimate, the scaling factor c and a replica of the second signal that has been shifted and scaled to match the first signal.
Advanced use
Some comments on using the function in real-world applications:
Error vector
The shifted / scaled replica of the second signal can be subtracted from the first signal. The residual can be considered "vector error", or signal energy in an output signal that cannot be "'explained" by the input signal. It may reveal unwanted artifacts even though they are buried below a strong wanted signal, for example extract the noise floor from a modulated signal.
Error vector spectrum
Especially the spectrum of the error vector can lead to interesting insights. My spectrum analyzer code snippet can be a useful tool to investigate:
Figure 7 shows an example of actual measurement data on a radio frequency amplifier:
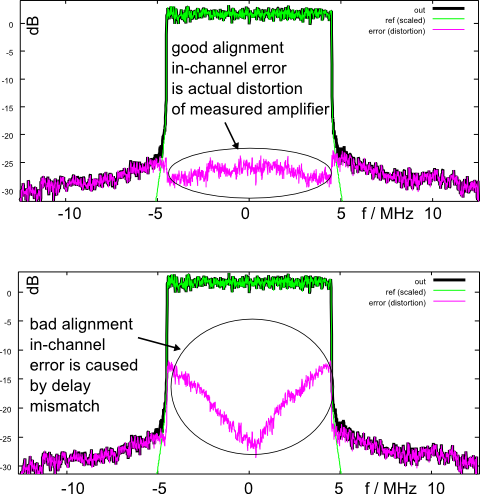
Figure 7: Example vector error spectrum
In short, the green trace shows the input signal to a power amplifier, and the black trace the output signal. Subtracting the time-aligned and scaled input from the output reveals distortion products both within and outside the wanted channel bandwidth of +/- 5 MHz. The in-channel distortion becomes visible only after removing the wanted signal itself.
In the lower picture, an artificial delay of 7 ns was introduced before subtracting the signals. The delay mismatch causes an error that obscures the distortion products, particularly at higher frequencies. This example illustrates the need for accurate delay compensation in wideband measurements.
If the error vector spectrum increases with frequency in a V-shape, it is a sign for delay misalignment or frequency mismatch of radio frequency carriers. A typical cause is that a measurement instrument returns n+1 samples for a time period that should result only in n samples. The same will happen if radio frequency generator and analyzer don't use a common reference clock.
Phase unwrapping?
Finally, some words on phase unwrapping, which is a commonly used solution in frequency domain delay estimation:
Detect, where the relative phase between neighboring samples changes by more than pi, and correct with a multiple of 2 pi:
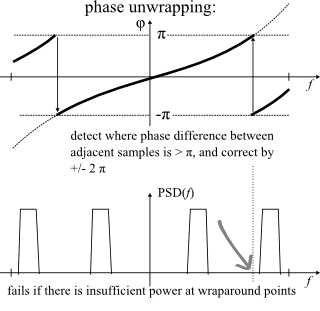
Figure 8: Phase unwrapping
If the signal-to-noise ratio over the unwrapping range is consistently high, all is well.
Unfortunately, only one noisy frequency sample within the signal bandwidth may cause an unwrapping error, leading to catastrophic failure.
Typical causes are:
- AC coupling or DC offset compensation, i.e. removal of carrier leakage around 0 Hz in a radio receiver
- Multi-channel signals with guard bands between channels
- Signals with narrow-band test tones (sine waves)
- narrow-band interference inside a wideband signal
Phase unwrapping is implemented in the code snippet, but disabled by default. Set enableUnwrap = true to turn it on, and set enableCoarseCorr = false to disable the coarse correction and rely solely on phase unwrapping.
References
[2] Wikipedia: Cramér-Rao Bound
[3] Moddemeijer, R., An information theoretical delay estimator




- Comments
- Write a Comment Select to add a comment

if we process reciving data by the computer and easilly can sample recivings signal with upper rate , then is still importat to be worried about fraction delays
and one more thing would you please tell me is it posibble to determin disatnce and angel of a pinger whit known ping(18k) throught 3 hydrophone which is loacated in 120 degre from each other in space . if u wanted to do that which one of TDE method you would use ?
thanks so much
if oversampling does the job and can be done with reasonable effort, it may well be enough. It is a common solution. If not feasible, I'd probably try something like the "iterDelayEst" subroutine in the downloadable code snippet in Matlab.
What you should keep in mind is that the above method tends to lock to the strongest reflection of your signal, not the first one. Maybe this is not what you want, if you intend to measure the shortest path.
Hi Markus,
I have read your post and the post of "Signal fitting with subsample resolution", are you talking about Fractional Sampling? ..
Actually, I need to implement the fractional sampling for OFDM, what I know, after fractional sampling is done, we can have multi output instead of one. for example if y = x * h + v , where y is the output signal, x is the transmitted signal, h is the channel, and v is the noise .. so after the fractional sampling, we should have, yg = x * hg + vg .. where g is the oversampling ratio representing the signal .. if g = 2 .. so we supposed to have .. y1 = x * h1 + v1 and y2 = x * h2 + v2 where y1 and y2 are the polyphse components of signal y.
but when I build the code I get strange results. Do you have any idea how to implement the fractional sampling on ofdm? thanks
Hi,
for OFDM there may be a shortcut: you've got the pre-IFFT signal, simply zero-pad the center in the frequency domain to e.g twice the size for 2x upsampling. This takes the least coding effort but may be too expensive / power hungry in implementation.
For polyphase filter design, you might have a look here: https://www.dsprelated.com/showarticle/156.php
You'll need only one 2-up stage (insert zeros, then lowpass-filter). Depending on your system "numerology", there may be little excess bandwidth separating the signal from the next alias zone, so this isn't necessarily easy.
I just mention this: note that this filter causes time dispersion of OFDM symbols by the filter pulse shape. This eats away from the cyclic prefix "budget" when symbols leak into each other in time (ISI). This is avoided by the FFT method because it happens pre-CP insertion.
Hello Mr Markus,
I have read your post about "Delay Estimation by fft". I'm working on acoustic signals implemented on smartphone. Actually i want to calculate or estimate the time-varying between the sender (speaker) and the receiver (microphones, I'm working on two microphones). I want to apply the cross-correlation to determine the delay. Can this code "fitSignal_FFT" shared, can work on it? I've tried the code but still not satified with my result, maybe i didn't use well the code on load data or I'm wrong. Need your help. Can you please help me, how to insert or input the audio data and calculate correctly the delay? This is my code:
h = (0:15) * 2 * pi / 16;
ref = sin(ph);
y = fopen('F:\fast\audio1.pcm')
x = fread(y,inf,'int16')
[coeff, shiftedRef, delta] = fitSignal_FFT(sig, ref);
figure(); hold on;
plot(ref, 'k+-');
h = plot(sig, 'b+-'); set(h, 'lineWidth', 5);
plot(shiftedRef, 'g+-')
legend('reference signal', 'signal', 'reference shifted / scaled to signal');
title('fitSignal\_FFT demo');
Your help will be greatful. Thank you very much.
Hi,
there's quite a few things to be commented here.
First of all, a sine wave is not a good signal for your purpose (unless you're content to operate within one wavelength. If so, the appropriate method is just multiply-accumulate with sine and cosine, then atan2() to get the phase).
The "fitSignal" algorithm is conceptually not useful with a sine signal, and it gets quite obvious why if I go through the steps, knowing that most of the spectrum holds no information (the least-squares fit stage stops making sense).
Theory says a white spectrum is best (uniform power density, see Cramér-Rao for the math) but there's one problem: It will fry your speaker. Been there, got the T-shirt, and up in smoke went my trusty old Nokia Communicator, a long time ago in a galaxy far, far away.
So if you want to use the fitSignal function, you should ultimately aim for a pink(ish) noise signal, which is closer to what speakers are designed for to endure, also more ear-friendly. Transmit a periodic signal (say, periodic in 100 ms), and capture an exact period length. Then the algorithm should work, at least if you use one full-duplex sound device that runs Tx and Rx from the same crystal.
Now if you want to use two different hardware devices, you may have to account for frequency error ("FEC" frequency error estimation and correction) or you'll be limited in capture length and frequency but that's a different problem.
I think what you need is a simple crosscorrelation (FFT both sides, conjugate one, multiply, IFFT. Note the above comment on periodic signals.
Look at the peak bin and its two neighbors, fit a square polynomial and locate its peak. This is probably "close enough" for all practical purposes with regard to consumer audio.
The "fitSignal" algorithm could make sense when you need 6+ orders of magnitude higher accuracy, e.g. when I need to prove that one of my devices has a PLL design flaw that causes a femtosecond-per-second drift (real world use case).
I really appreciate your comment. I’m using a cosine signal fmcw and cw signals. I’m using both in one device(smartphone) to send the signals as superposed signals. First, I want to calculate the time delay as mentioned of the two signal. Second, I want to see the time difference between the two signals during transmission. The fitsignal can help in this issue? I tried to calculate the frequency spectrum using the cross-correlation and fft and I find that the power of the signal in different sections of the signal change, is that right? Third, I want to plot them in the spectrogram domain to see the transmitted and received signals(fmcw and ce) that was mixed during the transmission.
One More question: what the impact of combining two acoustic signals at the same time? The signal will be more powerful or same as when we send one signal fmcw signal? If sending both at the same time, the received signal has ability to collect more data? Need to be clear in my mind, I’m confuse.
Can you please help me how to solve the problem, and how to plot them in matlab with codes.
Thanks in advance
To post reply to a comment, click on the 'reply' button attached to each comment. To post a new comment (not a reply to a comment) check out the 'Write a Comment' tab at the top of the comments.
Please login (on the right) if you already have an account on this platform.
Otherwise, please use this form to register (free) an join one of the largest online community for Electrical/Embedded/DSP/FPGA/ML engineers:





