



Forming Outputs
Any system output is some function of the state, and possibly the input (directly):
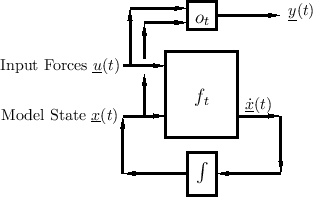
The general case of output extraction is shown in Fig.1.5.
The output signal (vector) is most typically a linear combination of state variables and possibly the current input:
Next Section:
State-Space Model of a Force-Driven Mass







