



Nonlinear Piano-String Equations of Motion in State-Space Form
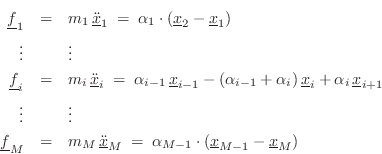
For the flexible (non-stiff) mass-spring string, referring to
Fig.9.26 and Eq.![]() (9.34), we have the following
equations of motion:
(9.34), we have the following
equations of motion:
or, in ![]() vector form,
vector form,
Next Section:
Finite Difference Implementation
Previous Section:
A Stiff Mass-Spring String Model







