



Plotting the Range Doppler of an FMCW Radar developed for Vital Signs.
The FMCW radar with the following parameters was implemented:
%System parametersValue
%----------------------------------
%Operating frequency (GHz)77
%Maximum target range (m)15
%Range resolution (m)0.037
%Maximum target speed (km/h)30 for fall detection
%Sweep time (microseconds)50
%Sweep bandwidth (GHz)4
%Maximum beat frequency (MHz) 73
%Sample rate (GHz)4.050
A target was simulated with the following parameters(static radar)
dist = 14;
speed = 10*1000/3600; ;%2.77km/h
rcs = 100;
and the Range Doppler image plotted using the phased array functions.
RangeFFTLength = 2048;
DopplerFFTLength = 512;
rngdopresp = phased.RangeDopplerResponse('PropagationSpeed',c,...
'DopplerOutput','Speed','OperatingFrequency',fc,'SampleRate',fs,...
'RangeMethod','FFT','SweepSlope',sweep_slope,...
'RangeFFTLengthSource','Property','RangeFFTLength',RangeFFTLength,...
'DopplerFFTLengthSource','Property','DopplerFFTLength',DopplerFFTLength);
figure
plotResponse(rngdopresp,xr);
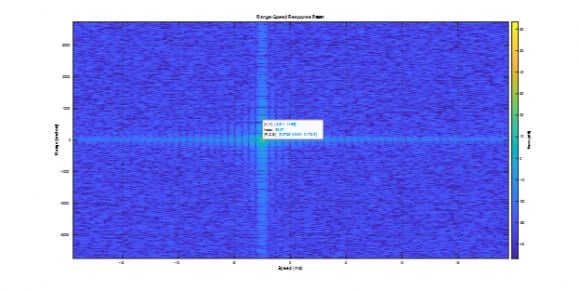
The results are as expected.
Interested to get the same results implementing the 2DFFT manually.
For this purpose the following code was used:
Nr = RangeFFTLength;
Nd = DopplerFFTLength;
% 2D FFT using the FFT size for both dimensions.
sig_fft2 = fft2(xr,Nr,Nd);
% Taking just one side of signal from Range dimension.
sig_fft2 = sig_fft2(1:Nr/2,1:Nd);
sig_fft2 = fftshift (sig_fft2);
RDM = abs(sig_fft2);
RDM = 10*log10(RDM);
Yielding the following:
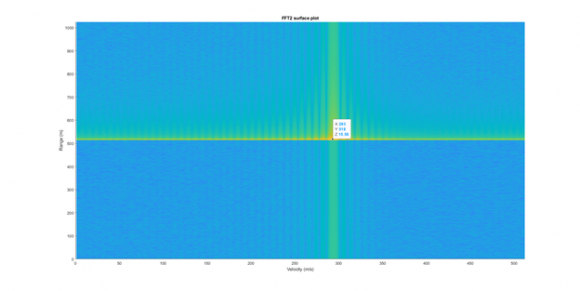
The index of the range and velocity are: [518 229].
This yields the following values:
Range:
fb=fs/2;
range_max = c*fb/(2*sweep_slope);
distance = ((518-512)/512)*range_max
distance =
43.9453
This is 3 times larger then the correct value. Why?
Velocity:
Converting the index to the abs value using the following, yields correct value:
vel_max = lambda/(4*tm);
sp = ((293-256)/256)*vel_max
sp =
2.8155
Seems, however, that the velocity in this case is positive – why?
The code can be seen below:









