



The Extended Karplus-Strong Algorithm
Figure 9.2 shows a block diagram of the Extended Karplus-Strong (EKS) algorithm [207].
![\includegraphics[width=\twidth]{eps/eks}](http://www.dsprelated.com/josimages_new/pasp/img1964.png)
The EKS adds the following features to the KS algorithm:
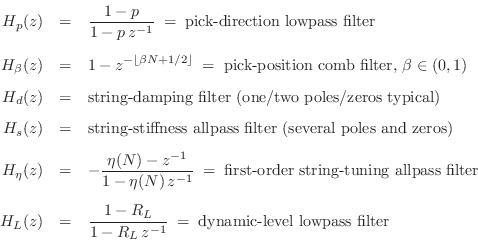
where
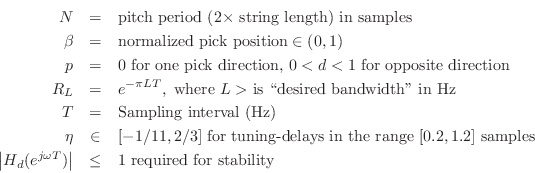
Note that while
![]() can be used in the tuning allpass, it
is better to offset it to
can be used in the tuning allpass, it
is better to offset it to
![]() to avoid delays
close to zero in the tuning allpass. (A zero delay is obtained by a
pole-zero cancellation on the unit circle.) First-order allpass
interpolation of delay lines was discussed in §4.1.2.
to avoid delays
close to zero in the tuning allpass. (A zero delay is obtained by a
pole-zero cancellation on the unit circle.) First-order allpass
interpolation of delay lines was discussed in §4.1.2.
A history of the Karplus-Strong algorithm and its extensions is given
in §A.8. EKS sound
examples
are also available on the Web. Techniques for designing the
string-damping filter ![]() and/or the string-stiffness allpass
filter
and/or the string-stiffness allpass
filter ![]() are summarized below in §6.11.
are summarized below in §6.11.
An implementation of the Extended Karplus-Strong (EKS) algorithm in the Faust programming language is described (and provided) in [454].
Next Section:
Nonlinear Distortion
Previous Section:
The Karplus-Strong Algorithm






