



General Causal FIR Filters
The most general case--a TDL having a tap after every delay
element--is the general causal Finite Impulse Response (FIR)
filter, shown in Fig.2.22. It is restricted to be causal
because the output ![]() may not depend on ``future'' inputs
may not depend on ``future'' inputs
![]() ,
, ![]() , etc. The FIR filter is also called a
transversal filter. FIR filters are described in greater
detail in [449].
, etc. The FIR filter is also called a
transversal filter. FIR filters are described in greater
detail in [449].
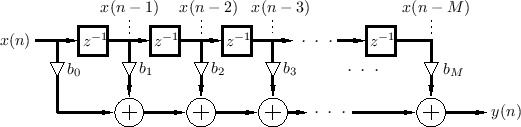
The difference equation for the ![]() th-order FIR filter in Fig.2.22
is, by inspection,
th-order FIR filter in Fig.2.22
is, by inspection,

The STK class for implementing arbitrary direct-form FIR filters is called Fir. (There is also a class for IIR filters named Iir.) In Matlab and Octave, the built-in function filter is normally used.
Next Section:
Feedforward Comb Filters
Previous Section:
TDL for Parallel Processing






