



Compressive Sensing - Recovery of Sparse Signals (Part 1)
The amount of data that is generated has been increasing at a substantial rate since the beginning of the digital revolution. The constraints on the sampling and reconstruction of digital signals are derived from the well-known Nyquist-Shannon sampling theorem. To review, the theorem states that a band-limited signal, with the highest frequency of $f_{max}$, can be completely reconstructed from its samples if the sampling rate, $f_{s}$, is at least twice the signal bandwidth. If the Nyquist-Shannon criteria is not satisfied then any frequency component greater than $f_{s}/2$ will become indistinguishable from a lower frequency component (i.e. aliasing).
Although the Nyquist-Shannon criteria gives a concrete formula for recovery of bandlimited signals, it is becoming increasingly impractical to implement due to ever-increasing size of data being generated. For example, high-resolution images taken from modern image sensors cause a lot of burden on communication channels, or in some cases, the communications channels are inadequate for efficient data transfer [1]. Due to increasing impracticality, a lot of research in the past decade has been focused on the recovery of signals from far fewer samples than required by the Nyquist-Shannon sampling criteria.
Before going any further, it is important to formulate a mathematical definition of signal acquisition and recovery process. Signal acquisition can be stated as a classical linear algebra problem
$$y = Ax$$
where $y \in \mathbb{R}^{m}$ or $y \in \mathbb{C}^{m}$ is the measured signal vector, $x \in \mathbb{R}^{m}$ or $x \in \mathbb{C}^{m}$ is the unknown signal vector, and $A \in \mathbb{R}^{m \times n}$ or $A \in \mathbb{C}^{m \times n}$ is measurement or "sensing'' matrix. For example, $y$ could be a vector obtained through spectral (fourier) measurement of audio signal, in which case the vector would consist of fourier coefficents of the signal $x$, and $A$ would be a fourier transformation matrix. In the signal recovery process, the objective is to find to unknown signal vector $x$ given $y$ and $A$. So the signal recovery requires solving the inverse problem
$$x = A^{-1}y$$
In traditional signal processing, $A$ is a full rank matrix, and $m$ is typically much larger than $n$ so that $x$ can be recovered with high fidelity (i.e. over-determined system). However, the problem of interest is to recover $x$ from far fewer samples than required by the Nyquist-Shannon criteria, or when $m << n$ (i.e. under-determined system). It turns out that if signals are structured in a certain way, then it is possible, at least in theory, to recover signals from fewer samples than suggested by the Nyquist-Shannon theorem. One set of signals that can theoretically be recovered from far fewer samples are signals that are
$$\Sigma_{k} = {x: |supp(x)| \leq k}$$
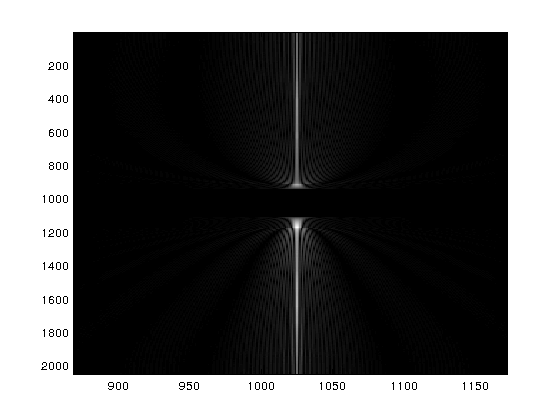
where $supp(x)$ is the support of vector $x$ and $|supp(x)|$ denotes the cardinality of the set of points where x is non-zero. An example of $k$-sparse signal is the fourier transform of the Shepp-Logan phantom image, which is a standard test image in medical signal processing. The fourier transform of the test image is given below.
Figure 1: Shepp-Logan test image.
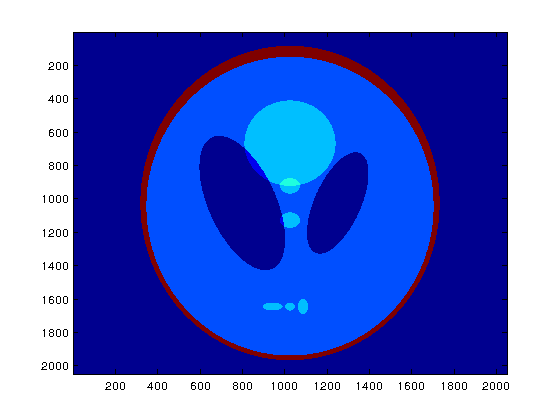
Figure 2: FFT of the Shepp-Logan test image. Due to the sparse nature of the fourier transform, the fourier coefficients are non-zero over a very small area.
If the signal $x$ is k-sparse then it only has $k$ degrees of freedom and it could, in principle, be uniquely determined from $m << n$ measurements if certain requirements are met. The complete mathematical form of these requirements can be found in [4]. For brevity, I will just paraphrase the requirements as follows
- $x$ can be uniquely reconstructed from $y$ if the $m \times n$ matrix $A$ is such that every set of $2k$ columns of $A$ are linearly independent.
- The lower bound on dimensionality of $y$ is $m \geq Ck\log(\frac{n}{k})$, where constant $C \approx 0.28$.
$x$ can be uniquely reconstructed by solving the following well-known convex optimisation problem
$$minimise \; |x|_{1}\\subject \;to \;Ax=y $$
where $|x|_{1}$ is l-1 norm. The problem is also known as basis pursuit.
This is a very brief theoretical background of sparse signal recovery, which is also known as "compressed" or "compressive" sensing (CS). In my next blog post, I will demonstrate sparse recovery by providing a simulation. [Hopefully, that would be more interesting.]
[Side-note: I realise that it's not easy to wrap one's head around the formulation of signal acquisition and recovery as a classical linear algebra problem ($y=Ax$), since $x$ is typically an analog signal and I am representing it using a discrete vector. I will clarify this in a future post, but for now, the reader can get some background information from lectures on compressive sensing available at [2,3].]
[1] DARPA ARGUS super high-resolution camera (https://en.wikipedia.org/wiki/ARGUS-IS)
[2] Yonina Elder's lecture on CS ()
[3] Richard Burbank's lecture CS (http://youtube.com/watch?v=RvMgVv-xZhQ)
[4] Eldar, Yonina C., and Gitta Kutyniok, eds. Compressed sensing: theory and applications. Cambridge University Press, 2012.
- Comments
- Write a Comment Select to add a comment
To post reply to a comment, click on the 'reply' button attached to each comment. To post a new comment (not a reply to a comment) check out the 'Write a Comment' tab at the top of the comments.
Please login (on the right) if you already have an account on this platform.
Otherwise, please use this form to register (free) an join one of the largest online community for Electrical/Embedded/DSP/FPGA/ML engineers:






