



Shift and Convolution Theorems
In this section, we prove the highly useful shift theorem and
convolution theorem for unilateral z transforms. We consider the space of
infinitely long, causal, complex sequences
![]() ,
,
![]() , with
, with ![]() for
for ![]() .
.
Shift Theorem
The shift theorem says that a delay of ![]() samples
in the time domain corresponds to a multiplication by
samples
in the time domain corresponds to a multiplication by
![]() in the frequency domain:
in the frequency domain:
Proof:
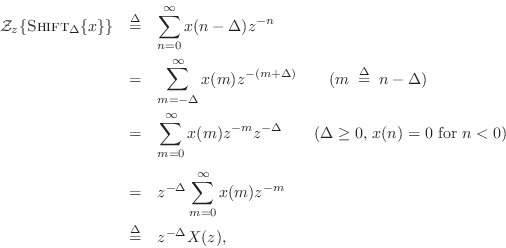
where we used the causality assumption ![]() for
for ![]() .
.
Convolution Theorem
The convolution theorem for z transforms states that for any (real or)
complex causal signals ![]() and
and ![]() ,
convolution in the time domain is multiplication in the
,
convolution in the time domain is multiplication in the
![]() domain, i.e.,
domain, i.e.,
Proof:
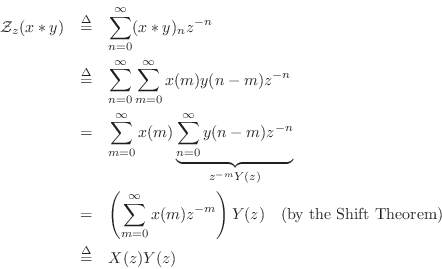
The convolution theorem provides a major cornerstone of linear systems theory. It implies, for example, that any stable causal LTI filter (recursive or nonrecursive) can be implemented by convolving the input signal with the impulse response of the filter, as shown in the next section.
Next Section:
Z Transform of Convolution
Previous Section:
Existence of the Z Transform






