



Selected Continuous-Time Fourier Theorems
This appendix presents Fourier theorems which are nice to know, but which do not, strictly speaking, pertain to the DFT. The differentiation theorem for Fourier Transforms comes up quite often, and its dual pertains as well to the DTFT (Appendix B). The scaling theorem provides an important basic insight into time-frequency duality. Finally, the very fundamental uncertainty principle is related to the scaling theorem.
Differentiation Theorem
Let ![]() denote a function differentiable for all
denote a function differentiable for all ![]() such that
such that
![]() and the Fourier Transforms (FT) of both
and the Fourier Transforms (FT) of both ![]() and
and
![]() exist, where
exist, where
![]() denotes the time derivative
of
denotes the time derivative
of ![]() . Then we have
. Then we have
Proof:
This follows immediately from integration by parts:
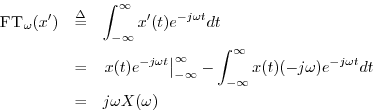
since
![]() .
.
The differentiation theorem is implicitly used in §E.6 to show that audio signals are perceptually equivalent to bandlimited signals which are infinitely differentiable for all time.
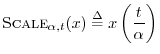
Scaling Theorem
The scaling theorem (or similarity theorem) provides
that if you horizontally ``stretch'' a signal by the factor ![]() in the time domain, you ``squeeze'' its Fourier transform by the same
factor in the frequency domain. This is an important general Fourier
duality relationship.
in the time domain, you ``squeeze'' its Fourier transform by the same
factor in the frequency domain. This is an important general Fourier
duality relationship.
Theorem: For all continuous-time functions ![]() possessing a Fourier
transform,
possessing a Fourier
transform,
Proof:
Taking the Fourier transform of the stretched signals gives
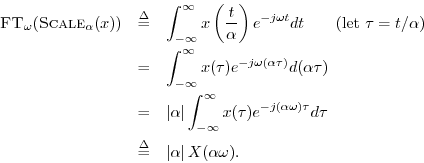
The absolute value appears above because, when ![]() ,
,
![]() , which brings out a minus sign in front of the
integral from
, which brings out a minus sign in front of the
integral from ![]() to
to ![]() .
.
The scaling theorem is fundamentally restricted to the
continuous-time, continuous-frequency (Fourier transform) case.
The closest we came to the scaling theorem among the DFT
theorems was the stretch theorem (§7.4.10). We found that
``stretching'' a discrete-time signal by the integer factor
![]() (filling in between samples with zeros) corresponded to the
spectrum being repeated
(filling in between samples with zeros) corresponded to the
spectrum being repeated ![]() times around the unit circle.
As a result, the ``baseband'' copy of the spectrum ``shrinks'' in
width (relative to
times around the unit circle.
As a result, the ``baseband'' copy of the spectrum ``shrinks'' in
width (relative to ![]() ) by the factor
) by the factor ![]() . Similarly,
stretching a signal using interpolation (instead of zero-fill)
corresponded to the same repeated spectrum with the spectral copies
zeroed out. The spectrum of the interpolated signal can therefore be
seen as having been stretched by the inverse of the time-domain
stretch factor. In summary, the stretch theorem for DFTs can be
viewed as the discrete-time, discrete-frequency counterpart of the
scaling theorem for Fourier Transforms.
. Similarly,
stretching a signal using interpolation (instead of zero-fill)
corresponded to the same repeated spectrum with the spectral copies
zeroed out. The spectrum of the interpolated signal can therefore be
seen as having been stretched by the inverse of the time-domain
stretch factor. In summary, the stretch theorem for DFTs can be
viewed as the discrete-time, discrete-frequency counterpart of the
scaling theorem for Fourier Transforms.
The Uncertainty Principle
The uncertainty principle (for Fourier transform pairs) follows immediately from the scaling theorem. It may be loosely stated as
Time DurationwhereFrequency Bandwidth
c
If duration and bandwidth are defined as the ``nonzero interval,''
then we obtain ![]() , which is not very useful. This conclusion
follows immediately from the definition of the Fourier transform
and its inverse in §B.2.
, which is not very useful. This conclusion
follows immediately from the definition of the Fourier transform
and its inverse in §B.2.
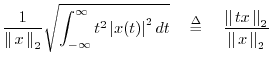
Duration and Bandwidth as Second Moments
More interesting definitions of duration and bandwidth are obtained
for nonzero signals using the normalized second moments of the
squared magnitude:
where
![\begin{eqnarray*}
\nonumber \\ [10pt]
\left\Vert\,x\,\right\Vert _2^2 &\isdef &...
...}^\infty \left\vert X(\omega)\right\vert^2 \frac{d\omega}{2\pi}.
\end{eqnarray*}](http://www.dsprelated.com/josimages_new/mdft/img1742.png)
By the DTFT power theorem, which is proved in a manner
analogous to the DFT case in §7.4.8, we have
![]() . Note that writing ``
. Note that writing ``
![]() '' and
``
'' and
``
![]() '' is an abuse of notation, but a convenient one.
These duration/bandwidth definitions are routinely used in physics,
e.g., in connection with the Heisenberg uncertainty principle.C.1Under these definitions, we have the following theorem
[52, p. 273-274]:
'' is an abuse of notation, but a convenient one.
These duration/bandwidth definitions are routinely used in physics,
e.g., in connection with the Heisenberg uncertainty principle.C.1Under these definitions, we have the following theorem
[52, p. 273-274]:
Theorem: If
![]() and
and
![]() as
as
![]() , then
, then
with equality if and only if
Proof: Without loss of generality, we may take consider ![]() to be real
and normalized to have unit
to be real
and normalized to have unit ![]() norm (
norm (
![]() ). From the
Schwarz inequality (see §5.9.3 for the discrete-time case),
). From the
Schwarz inequality (see §5.9.3 for the discrete-time case),

The left-hand side can be evaluated using integration by parts:

The second term on the right-hand side of Eq.![]() (C.3) can be
evaluated using the power theorem
(§7.4.8 proves the discrete-time case)
and differentiation theorem (§C.1 above):
(C.3) can be
evaluated using the power theorem
(§7.4.8 proves the discrete-time case)
and differentiation theorem (§C.1 above):

If equality holds in the uncertainty relation Eq.![]() (C.2), then
Eq.
(C.2), then
Eq.![]() (C.3) implies
(C.3) implies
Time-Limited Signals
If ![]() for
for
![]() , then
, then
Proof: See [52, pp. 274-5].
Time-Bandwidth Products are Unbounded Above
We have considered two lower bounds for the time-bandwidth product
based on two different definitions of duration in time. In the
opposite direction, there is no upper bound on time-bandwidth
product. To see this, imagine filtering an arbitrary signal with an
allpass filter.C.2 The allpass filter cannot affect
bandwidth
![]() , but the duration
, but the duration ![]() can be arbitrarily extended by
successive applications of the allpass filter.
can be arbitrarily extended by
successive applications of the allpass filter.
Next Section:
Sampling Theory
Previous Section:
Fourier Transforms for Continuous/Discrete Time/Frequency






