



Resampling by Lagrange-polynomial interpolation
Calculates Lagrange-resampler coefficients and resamples an example signal.
A Lagrange-resampler evaluates the unique n-th order polynomial that crosses through n+1 input samples.
This code snippet maps it to a generic Farrow structure with n+1 taps and n+1 polynomial coefficients per tap.
Fig. 1 shows the impulse response of a four-point resampler (3rd order polynomial), and a published reference result from literature, which can be found in the code.
The circles illustrate the output [0, 1, 0] from the Lagrange polynomial corresponding to the center FIR tap, when evaluated for an offset x = 0.
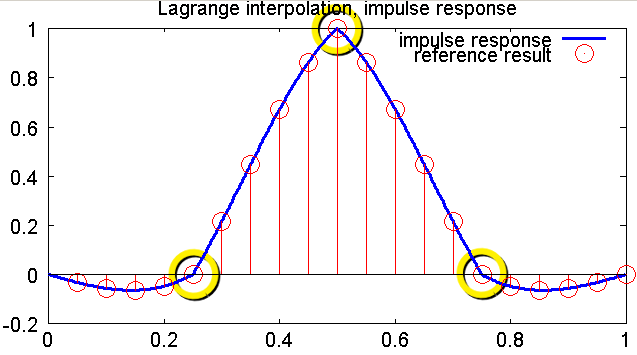
Fig. 1: Impulse response for four-point (cubic) Lagrange interpolation
Fig. 2 compares the impulse responses for increasing order with the ideal sinc() response, which is aymptotically approached as the order increases:
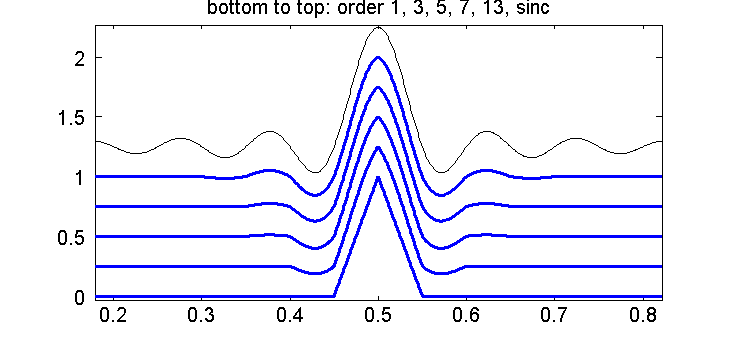
Fig. 2: Impulse responses for increasing interpolation order, and sinc() response.
Copy the code snippet into lagrangeResamplingDemo.m and run it by its name in Matlab / Octave.
Update 18.8.2011: Fixed a bug with the final two assert() statements. Now it works in OctaveForge and Matlab.
Update 3.8.2012: An alternative version that resamples an actual signal can be found here. It is related to this discussion on comp.dsp.
% Lagrange interpolation for resampling
% References:
% [1] A digital signal processing approach to Interpolation
% Ronald W. Schafer and Lawrence R. Rabiner
% Proc. IEEE vol 61, pp.692-702, June 1973
% [2] https://ccrma.stanford.edu/~jos/Interpolation/Lagrange_Interpolation.html
% [3] Splitting the Unit delay: Tools for fractional delay filter design
% T. I. Laakso, V. Valimaki, M. Karjalainen, and U. K. Laine
% IEEE Signal Processing Magazine, vol. 13, no. 1, pp. 30..60, January 1996
function lagrangeResamplingDemo()
originDefinition = 0; % see comment for LagrangeBasisPolynomial() below
% Regarding order: From [1]
% "Indeed, it is easy to show that whenever Q is odd, none of the
% impulse responses corresponding to Lagrange interpolation can have
% linear phase"
% Here, order = Q+1 => odd orders are preferable
order = 3;
% *******************************************************************
% Set up signals
% *******************************************************************
nIn = order + 1;
nOut = nIn * 5 * 20;
% Reference data: from [1] fig. 8, linear-phase type
ref = [-0.032, -0.056, -0.064, -0.048, 0, ...
0.216, 0.448, 0.672, 0.864, 1, ...
0.864, 0.672, 0.448, 0.216, 0, ...
-0.048, -0.064, -0.056, -0.032, 0];
tRef = (1:size(ref, 2)) / size(ref, 2);
% impulse input to obtain impulse response
inData = zeros(1, nIn);
inData(1) = 1;
outData = zeros(1, nOut);
outTime = 0:(nOut-1);
outTimeAtInput = outTime / nOut * nIn;
outTimeAtInputInteger = floor(outTimeAtInput);
outTimeAtInputFractional = outTimeAtInput - outTimeAtInputInteger;
evalFracTime = outTimeAtInputFractional - 0.5 + originDefinition;
% odd-order modification
if mod(order, 2) == 0
% Continuity of the impulse response is achieved when support points are located at
% the intersections between adjacent segments "at +/- 0.5"
% For an even order polynomial (odd number of points), this is only possible with
% an asymmetric impulse response
offset = 0.5;
%offset = -0.5; % alternatively, its mirror image
else
offset = 0;
end
% *******************************************************************
% Apply Lagrange interpolation to input data
% *******************************************************************
for ixTap = 0:order
% ixInSample is the input sample that appears at FIR tap 'ixTap' to contribute
% to the output sample
% Row vector, for all output samples in parallel
ixInSample = mod(outTimeAtInputInteger + ixTap - order, nIn) + 1;
% the value of said input sample, for all output samples in parallel
d = inData(ixInSample);
% Get Lagrange polynomial coefficients of this tap
c = lagrangeBasisPolynomial(order, ixTap, originDefinition + offset);
% Evaluate the Lagrange polynomial, resulting in the time-varying FIR tap weight
cTap = polyval(c, evalFracTime);
% FIR operation: multiply FIR tap weight with input sample and add to
% output sample (all outputs in parallel)
outData = outData + d .* cTap;
end
% *******************************************************************
% Plot
% *******************************************************************
figure(); hold on;
h = plot((0:nOut-1) / nOut, outData, 'b-'); set(h, 'lineWidth', 3);
stem(tRef, ref, 'r'); set(h, 'lineWidth', 3);
legend('impulse response', 'reference result');
title('Lagrange interpolation, impulse response');
end
% Returns the coefficients of a Lagrange basis polynomial
% 1 <= order: Polynomial order
% 0 <= evalIx <= order: index of basis function.
%
% At the set of support points, the basis polynomials evaluate as follows:
% evalIx = 1: [1 0 0 ...]
% evalIx = 2: [0 1 0 ...]
% evalIx = 3: [0 0 1 ...]
%
% The support point are equally spaced.
% Example, using originDefinition=0:
% order = 1: [-0.5 0.5]
% order = 2: [-1 0 1]
% order = 3: [-1.5 -0.5 0.5 1.5]
%
% The area around the mid-point corresponds to -0.5 <= x <= 0.5.
% If a resampler implementation uses by convention 0 <= x <= 1 instead, set
% originDefinition=0.5 to offset
% the polynomial.
function polyCoeff = lagrangeBasisPolynomial(order, evalIx, originDefinition)
assert(evalIx >= 0);
assert(evalIx <= order);
tapLocations = -0.5*(order) + (0:order) + originDefinition;
polyCoeff = [1];
for loopIx = 0:order
if loopIx ~= evalIx
% numerator: places a zero in the polynomial via (x-xTap(k)), with k != evalIx
% denominator: scales to 1 amplitude at x=xTap(evalIx)
term = [1 -tapLocations(loopIx+1)] / (tapLocations(evalIx+1)-tapLocations(loopIx+1));
% multiply polynomials => convolve coefficients
polyCoeff = conv(polyCoeff, term);
end
end
% TEST:
% The Lagrange polynomial evaluates to 1 at the location of the tap
% corresponding to evalIx
thisTapLocation = tapLocations(evalIx+1);
pEval = polyval(polyCoeff, thisTapLocation);
assert(max(abs(pEval) - 1) < 1e6*eps);
% The Lagrange polynomial evaluates to 0 at all other tap locations
tapLocations(evalIx+1) = [];
pEval = polyval(polyCoeff, tapLocations);
assert(max(abs(pEval)) < 1e6*eps);
end




