



Wave Digital Spring
In the case of a spring with stiffness ![]() , we have the impedance
, we have the impedance
![$\displaystyle \fbox{$\displaystyle \hat{\tilde{\rho}}_k(z) = z^{-1}$} \qquad\makebox[0pt][l]{(Wave Digital Spring)}
$](http://www.dsprelated.com/josimages_new/pasp/img4811.png)
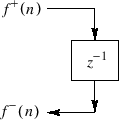
Thus, the WDF of a spring is simply a unit-sample delay, which is just the negative of the WDF mass. If we were to switch to velocity waves instead of force waves, both masses and springs would again correspond to unit-sample delays, but the spring would become inverting and the mass non-inverting.
Next Section:
Wave Digital Dashpot
Previous Section:
Wave Digital Mass






