



Convolution
The convolution of two signals ![]() and
and ![]() in
in ![]() may be
denoted ``
may be
denoted ``
![]() '' and defined by
'' and defined by
Cyclic convolution can be expressed in terms of previously defined operators as

Commutativity of Convolution
Convolution (cyclic or acyclic) is commutative, i.e.,
Proof:
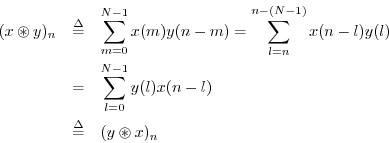
In the first step we made the change of summation variable
![]() , and in the second step, we made use of the fact
that any sum over all
, and in the second step, we made use of the fact
that any sum over all ![]() terms is equivalent to a sum from 0 to
terms is equivalent to a sum from 0 to
![]() .
.
Convolution as a Filtering Operation
In a convolution of two signals
![]() , where both
, where both ![]() and
and ![]() are signals of length
are signals of length ![]() (real or complex), we may interpret either
(real or complex), we may interpret either
![]() or
or ![]() as a filter that operates on the other signal
which is in turn interpreted as the filter's ``input signal''.7.5 Let
as a filter that operates on the other signal
which is in turn interpreted as the filter's ``input signal''.7.5 Let
![]() denote a length
denote a length ![]() signal that is interpreted
as a filter. Then given any input signal
signal that is interpreted
as a filter. Then given any input signal
![]() , the filter output
signal
, the filter output
signal
![]() may be defined as the cyclic convolution of
may be defined as the cyclic convolution of
![]() and
and ![]() :
:
![$\displaystyle \delta(n) = \left\{\begin{array}{ll}
1, & n=0\;\mbox{(mod $N$)} \\ [5pt]
0, & n\ne 0\;\mbox{(mod $N$)}. \\
\end{array} \right.
$](http://www.dsprelated.com/josimages_new/mdft/img1170.png)
![$\displaystyle \delta(n) \isdef \left\{\begin{array}{ll}
1, & n=0 \\ [5pt]
0, & n\ne 0 \\
\end{array} \right.
$](http://www.dsprelated.com/josimages_new/mdft/img1172.png)
As discussed below (§7.2.7), one may embed acyclic convolution within a larger cyclic convolution. In this way, real-world systems may be simulated using fast DFT convolutions (see Appendix A for more on fast convolution algorithms).
Note that only linear, time-invariant (LTI) filters can be completely represented by their impulse response (the filter output in response to an impulse at time 0). The convolution representation of LTI digital filters is fully discussed in Book II [68] of the music signal processing book series (in which this is Book I).
Convolution Example 1: Smoothing a Rectangular Pulse
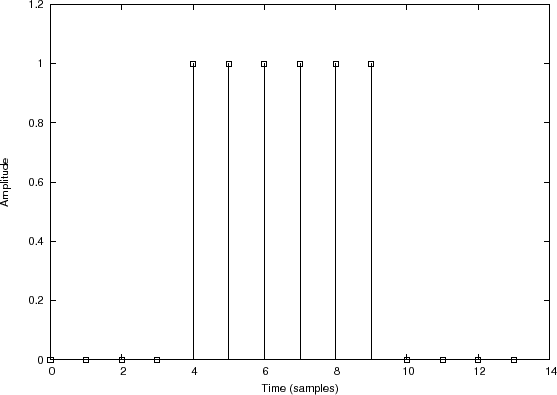
Filter
input signal 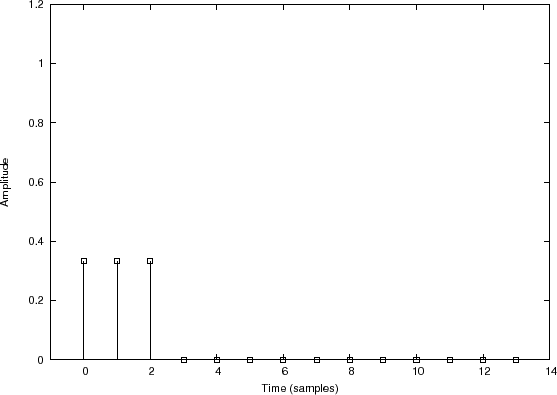
Filter impulse response 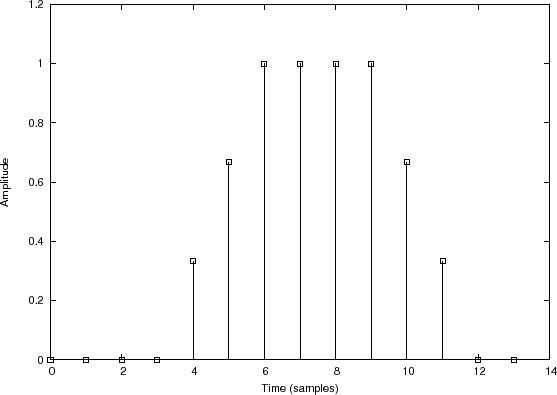
Filter output signal |
Figure 7.3 illustrates convolution of
![$\displaystyle h = \left[\frac{1}{3},\frac{1}{3},\frac{1}{3},0,0,0,0,0,0,0,0,0,0,0\right]
$](http://www.dsprelated.com/josimages_new/mdft/img1177.png)
![$\displaystyle y = x\circledast h = \left[0,0,0,0,\frac{1}{3},\frac{2}{3},1,1,1,1,\frac{2}{3},\frac{1}{3},0,0\right] \protect$](http://www.dsprelated.com/josimages_new/mdft/img1178.png)
as graphed in Fig.7.3(c). In this case,
![$\displaystyle h=\left[\frac{1}{3},\frac{1}{3},0,0,0,0,0,0,0,0,0,0,\frac{1}{3}\right]
$](http://www.dsprelated.com/josimages_new/mdft/img1179.png)
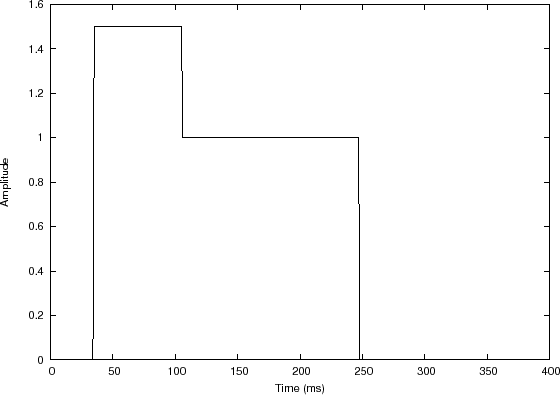
Convolution Example 2: ADSR Envelope
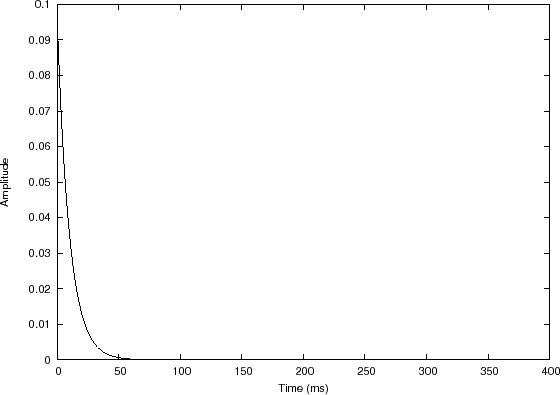
Filter impulse response 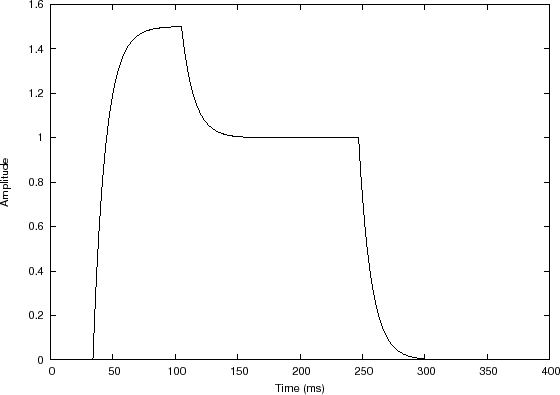
Filter output signal |
In this example, the input signal is a sequence of two rectangular pulses, creating a piecewise constant function, depicted in Fig.7.4(a). The filter impulse response, shown in Fig.7.4(b), is a truncated exponential.7.6
In this example, ![]() is again a causal smoothing-filter impulse
response, and we could call it a ``moving weighted average'', in which
the weighting is exponential into the past. The discontinuous steps
in the input become exponential ``asymptotes'' in the output which are
approached exponentially. The overall appearance of the output signal
resembles what is called an attack, decay, release, and sustain
envelope, or ADSR envelope for short. In a practical ADSR
envelope, the time-constants for attack, decay, and release may be set
independently. In this example, there is only one time constant, that
of
is again a causal smoothing-filter impulse
response, and we could call it a ``moving weighted average'', in which
the weighting is exponential into the past. The discontinuous steps
in the input become exponential ``asymptotes'' in the output which are
approached exponentially. The overall appearance of the output signal
resembles what is called an attack, decay, release, and sustain
envelope, or ADSR envelope for short. In a practical ADSR
envelope, the time-constants for attack, decay, and release may be set
independently. In this example, there is only one time constant, that
of ![]() . The two constant levels in the input signal may be called the
attack level and the sustain level, respectively. Thus,
the envelope approaches the attack level at the attack rate (where the
``rate'' may be defined as the reciprocal of the time constant), it
next approaches the sustain level at the ``decay rate'', and finally,
it approaches zero at the ``release rate''. These envelope parameters
are commonly used in analog synthesizers and their digital
descendants, so-called virtual analog synthesizers. Such an
ADSR envelope is typically used to multiply the output of a waveform
oscillator such as a sawtooth or pulse-train oscillator. For more on
virtual analog synthesis, see, for example,
[78,77].
. The two constant levels in the input signal may be called the
attack level and the sustain level, respectively. Thus,
the envelope approaches the attack level at the attack rate (where the
``rate'' may be defined as the reciprocal of the time constant), it
next approaches the sustain level at the ``decay rate'', and finally,
it approaches zero at the ``release rate''. These envelope parameters
are commonly used in analog synthesizers and their digital
descendants, so-called virtual analog synthesizers. Such an
ADSR envelope is typically used to multiply the output of a waveform
oscillator such as a sawtooth or pulse-train oscillator. For more on
virtual analog synthesis, see, for example,
[78,77].
Convolution Example 3: Matched Filtering
![\includegraphics[width=2.5in]{eps/conv}](http://www.dsprelated.com/josimages_new/mdft/img1185.png)
Figure 7.5 illustrates convolution of
![\begin{eqnarray*}
y&=&[1,1,1,1,0,0,0,0] \\
h&=&[1,0,0,0,0,1,1,1]
\end{eqnarray*}](http://www.dsprelated.com/josimages_new/mdft/img1186.png)
to get
For example,
Graphical Convolution
As mentioned above, cyclic convolution can be written as
Polynomial Multiplication
Note that when you multiply two polynomials together, their
coefficients are convolved. To see this, let ![]() denote the
denote the
![]() th-order polynomial
th-order polynomial
Denoting ![]() by
by
where ![]() and
and ![]() are doubly infinite sequences, defined as
zero for
are doubly infinite sequences, defined as
zero for ![]() and
and ![]() , respectively.
, respectively.
Multiplication of Decimal Numbers
Since decimal numbers are implicitly just polynomials in the powers of 10, e.g.,
Next Section:
Correlation
Previous Section:
Shift Operator






