



Design IIR Highpass Filters
This post is the fourth in a series of tutorials on IIR Butterworth filter design. So far we covered lowpass [1], bandpass [2], and band-reject [3] filters; now we’ll design highpass filters. The general approach, as before, has six steps:
- Find the poles of a lowpass analog prototype filter with Ωc = 1 rad/s.
- Given the -3 dB frequency of the digital highpass filter, find the corresponding frequency of the analog highpass filter (pre-warping).
- Transform the analog lowpass poles to analog highpass poles.
- Transform the poles from the s-plane to the z-plane, using the bilinear transform.
- Add N zeros at z= 1, where N is the filter order.
- Convert poles and zeros to polynomials with coefficients an and bn.
This article is available in PDF format for easy printing.
The detailed design procedure follows. Recall from the previous posts that F is continuous (analog) frequency in Hz and Ω is continuous radian frequency. A Matlab function hp_synth that performs the filter synthesis is provided in the Appendix. Note that hp_synth(N,fc,fs) gives the same results as the Matlab function butter(N,2*fc/fs,’high’).
1. Poles of the analog lowpass prototype filter. For a Butterworth filter of order N with Ωc = 1 rad/s, the poles are given by [4, 5]:
$$p'_{ak}= -sin(\theta)+jcos(\theta)$$
where $$\theta=\frac{(2k-1)\pi}{2N},\quad k=1:N$$
Here we use a prime superscript on p to distinguish the lowpass prototype poles from the yet to be calculated highpass poles.
2. Given the -3 dB discrete frequency fc of the digital highpass filter, find the corresponding frequency of the analog highpass filter. As before, we’ll adjust (pre-warp) the analog frequency to take the nonlinearity of the bilinear transform into account:
$$F_c=\frac{f_s}{\pi}tan\left(\frac{\pi f_c}{f_s}\right)$$
3. Transform the normalized analog lowpass poles to analog highpass poles. For each lowpass pole pa’, we get the highpass pole [6, 7]:
$$p_a=2\pi F_c/p'_a$$
4. Transform the
poles from the s-plane to the z-plane, using the bilinear transform [1]:
$$p_k=\frac{1+p_{ak}/(2f_s)}{1-p_{ak}/(2f_s)},\quad
k=1:N$$
5. Add N zeros at z= 1. The Nth-order highpass filter has
N zeros at ω= 0, or z= exp(j0) = 1. We
can now write H(z) as:
$$H(z)=K\frac{(z-1)^N}{(z-p_1)(z-p_2)...(z-p_{N})}\qquad(1)$$
In hp_synth, we represent the N zeros at +1 as a vector:
q= ones(1,N)
6. Convert poles and zeros to polynomials with coefficients an and bn. If we expand the numerator and denominator of equation 1 and divide numerator and denominator by zN, we get polynomials in z-n:
$$H(z)=K\frac{b_0+b_1z^{-1}+...+b_Nz^{-N}}{1+a_1z^{-1}+...+a_Nz^{-N}}\qquad(2)$$
The Matlab code to perform the expansion is:
a= poly(p) a= real(a) b= poly(q)
Given that H(z) is highpass, we want H(z) to have a gain of 1 at f = fs/2, that is, at ω= π. At ω= π, z = exp(jπ) = -1. Referring to equation 2, we then have gain at ω= π of:
$$H(z=-1)=1=K\frac{\sum_{m=0}^N(-1)^m*b_m}{\sum_{m=0}^N(-1)^m*a_m}$$
So we have:
$$K= \frac{\sum_{m=0}^N(-1)^m*a_m}{\sum_{m=0}^N(-1)^m*b_m}$$
Example
Here is an example function call for a 5th order highpass filter:
N= 5; % filter order
fc= 40; % Hz -3 dB frequency
fs= 100; % Hz sample frequency
[b,a]= hp_synth(N,fc,fs)
b = 0.0013 -0.0064 0.0128 -0.0128 0.0064 -0.0013
a = 1.0000 2.9754 3.8060 2.5453 0.8811 0.1254
To find the frequency response:
[h,f]= freqz(b,a,512,fs); H= 20*log10(abs(h));
The resulting response is shown in Figure 1, along
with the responses for N= 2, 3, and 7.
The pole-zero plot in the z-plane is shown in Figure 2.
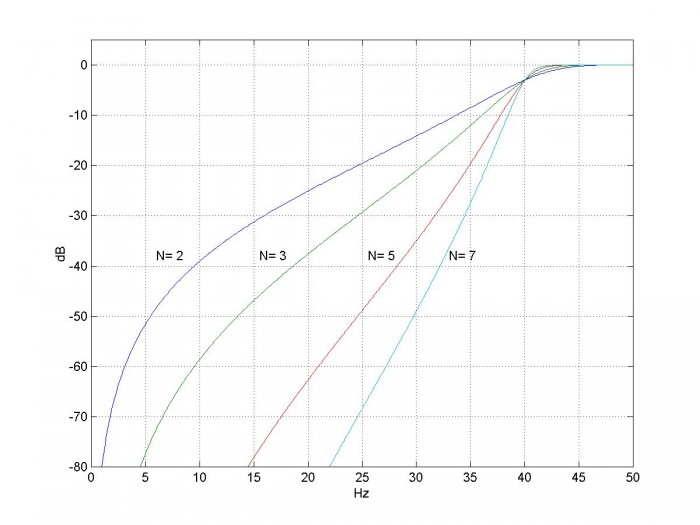
Figure 1. Magnitude Response of Butterworth highpass filters for various filter orders.
fc = 40 Hz and fs = 100 Hz.
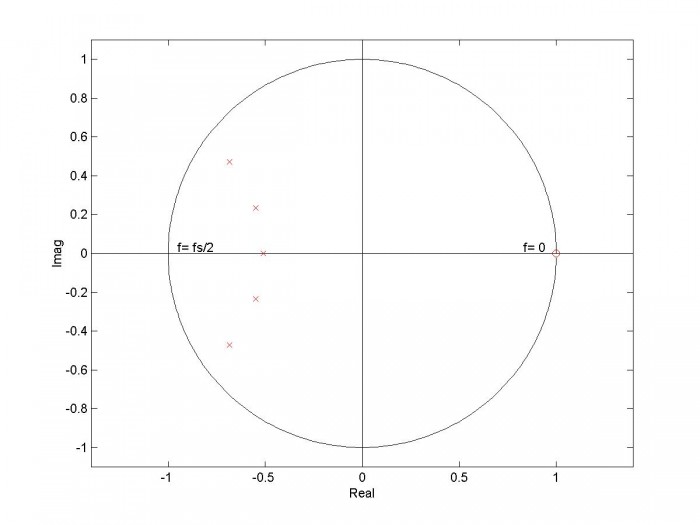
Figure 2. Pole-zero plot of 5th order Butterworth highpass filter. fc = 40 Hz and fs = 100 Hz.
Zero at z= 1 is 5th order.
References
1. Robertson, Neil , “Design IIR Butterworth Filters Using 12 Lines of Code”, Dec 2017 https://www.dsprelated.com/showarticle/1119.php
2. Robertson, Neil , “Design IIR Bandpass Filters”, Jan 2017 https://www.dsprelated.com/showarticle/1128.php
3. Robertson, Neil , “Design IIR Band-Reject Filters”, Jan 2017 https://www.dsprelated.com/showarticle/1131.php
4. Williams, Arthur B. and Taylor, Fred J., Electronic Filter Design Handbook, 3rd Ed., McGraw-Hill, 1995, section 2.3
5. Analog Devices Mini Tutorial MT-224, 2012 http://www.analog.com/media/en/training-seminars/tutorials/MT-224.pdf
6. Blinchikoff, Herman J., and Zverev,Anatol I., Filtering in the Time and Frequency Domains, Wiley, 1976, section 4.3.
7. Nagendra Krishnapura , “E4215: Analog Filter Synthesis and Design Frequency Transformation”, 4 Mar. 2003 http://www.ee.iitm.ac.in/~nagendra/E4215/2003/handouts/freq_transformation.pdf
Neil Robertson February, 2018
Appendix Matlab Function hp_synth.m
This program is provided as-is without any guarantees or warranty. The author is not responsible for any damage or losses of any kind caused by the use or misuse of the program.
% hp_synth.m 1/30/18 Neil Robertson
% Find the coefficients of an IIR Butterworth highpass filter using bilinear transform.
%
% N= filter order
% fc= -3 dB frequency in Hz
% fs= sample frequency in Hz
% b = numerator coefficients of digital filter
% a = denominator coefficients of digital filter
%
function [b,a]= hp_synth(N,fc,fs);
if fc>=fs/2;
error('fc must be less than fs/2')
end
% I. Find poles of normalized analog lowpass filter
k= 1:N;
theta= (2*k -1)*pi/(2*N);
p_lp= -sin(theta) + j*cos(theta); % poles of lpf with cutoff = 1 rad/s
% II. transform poles for hpf
Fc= fs/pi * tan(pi*fc/fs); % continuous pre-warped frequency
pa= 2*pi*Fc./p_lp; % analog hp poles
% III. Find coeffs of digital filter
% poles and zeros in the z plane
p= (1 + pa/(2*fs))./(1 - pa/(2*fs)); % poles by bilinear transform
q= ones(1,N); % zeros at z = 1 (f= 0)
% convert poles and zeros to polynomial coeffs
a= poly(p); % convert poles to polynomial coeffs a
a= real(a);
b= poly(q); % convert zeros to polynomial coeffs b
% amplitude scale factor for gain = 1 at f = fs/2 (z = -1)
m= 0:N;
K= sum((-1).^m .*a)/sum((-1).^m .*b); % amplitude scale factor
b= K*b;
- Comments
- Write a Comment Select to add a comment
Hello,
First of all, thank you very much for this. I am merely a developper trying to translate this in C and unfortunately I have poor knowledge of signal processing.
There is one thing that I do not understand here : what does "j" represent and which value should it contain ? I have no idea what to initialize it with.
Regards.

Hi,
j = sqrt(-1)
In electrical engineering/DSP, we usually use j and not i to indicate imaginary numbers (to avoid confusion with i as the symbol for current).
regards,
Neil
To post reply to a comment, click on the 'reply' button attached to each comment. To post a new comment (not a reply to a comment) check out the 'Write a Comment' tab at the top of the comments.
Please login (on the right) if you already have an account on this platform.
Otherwise, please use this form to register (free) an join one of the largest online community for Electrical/Embedded/DSP/FPGA/ML engineers:





