



Signal Reconstruction from Projections
We now know how to project a signal onto other signals. We now need
to learn how to reconstruct a signal
![]() from its projections
onto
from its projections
onto ![]() different vectors
different vectors
![]() ,
,
![]() . This
will give us the inverse DFT operation (or the inverse of
whatever transform we are working with).
. This
will give us the inverse DFT operation (or the inverse of
whatever transform we are working with).
As a simple example, consider the projection of a signal
![]() onto the
rectilinear coordinate axes of
onto the
rectilinear coordinate axes of ![]() . The coordinates of the
projection onto the 0th coordinate axis are simply
. The coordinates of the
projection onto the 0th coordinate axis are simply
![]() .
The projection along coordinate axis
.
The projection along coordinate axis ![]() has coordinates
has coordinates
![]() , and so on. The original signal
, and so on. The original signal ![]() is then clearly
the vector sum of its projections onto the coordinate axes:
is then clearly
the vector sum of its projections onto the coordinate axes:

To make sure the previous paragraph is understood, let's look at the
details for the case ![]() . We want to project an arbitrary
two-sample signal
. We want to project an arbitrary
two-sample signal
![]() onto the coordinate axes in 2D. A
coordinate axis can be generated by multiplying any nonzero vector by
scalars. The horizontal axis can be represented by any vector of the
form
onto the coordinate axes in 2D. A
coordinate axis can be generated by multiplying any nonzero vector by
scalars. The horizontal axis can be represented by any vector of the
form
![]() ,
,
![]() while the vertical axis can be
represented by any vector of the form
while the vertical axis can be
represented by any vector of the form
![]() ,
,
![]() .
For maximum simplicity, let's choose
.
For maximum simplicity, let's choose
![\begin{eqnarray*}
\underline{e}_0 &\isdef & [1,0], \\
\underline{e}_1 &\isdef & [0,1].
\end{eqnarray*}](http://www.dsprelated.com/josimages_new/mdft/img895.png)
The projection of ![]() onto
onto
![]() is, by definition,
is, by definition,
![\begin{eqnarray*}
{\bf P}_{\underline{e}_0}(x) &\isdef & \frac{\left<x,\underlin...
...0}) \underline{e}_0
= x_0 \underline{e}_0\\ [5pt]
&=& [x_0,0].
\end{eqnarray*}](http://www.dsprelated.com/josimages_new/mdft/img897.png)
Similarly, the projection of ![]() onto
onto
![]() is
is
![\begin{eqnarray*}
{\bf P}_{\underline{e}_1}(x) &\isdef & \frac{\left<x,\underlin...
...1}) \underline{e}_1
= x_1 \underline{e}_1\\ [5pt]
&=& [0,x_1].
\end{eqnarray*}](http://www.dsprelated.com/josimages_new/mdft/img899.png)
The reconstruction of ![]() from its projections onto the coordinate
axes is then the vector sum of the projections:
from its projections onto the coordinate
axes is then the vector sum of the projections:
The projection of a vector onto its coordinate axes is in some sense
trivial because the very meaning of the coordinates is that they are
scalars ![]() to be applied to the coordinate vectors
to be applied to the coordinate vectors
![]() in
order to form an arbitrary vector
in
order to form an arbitrary vector
![]() as a linear combination
of the coordinate vectors:
as a linear combination
of the coordinate vectors:
Changing Coordinates
What's more interesting is when we project a signal ![]() onto a set
of vectors other than the coordinate set. This can be viewed
as a change of coordinates in
onto a set
of vectors other than the coordinate set. This can be viewed
as a change of coordinates in ![]() . In the case of the DFT,
the new vectors will be chosen to be sampled complex sinusoids.
. In the case of the DFT,
the new vectors will be chosen to be sampled complex sinusoids.
An Example of Changing Coordinates in 2D
As a simple example, let's pick the following pair of new coordinate vectors in 2D:
![\begin{eqnarray*}
\sv_0 &\isdef & [1,1] \\
\sv_1 &\isdef & [1,-1]
\end{eqnarray*}](http://www.dsprelated.com/josimages_new/mdft/img905.png)
These happen to be the DFT sinusoids for ![]() having frequencies
having frequencies ![]() (``dc'') and
(``dc'') and ![]() (half the sampling rate). (The sampled complex
sinusoids of the DFT reduce to real numbers only for
(half the sampling rate). (The sampled complex
sinusoids of the DFT reduce to real numbers only for ![]() and
and ![]() .) We
already showed in an earlier example that these vectors are orthogonal. However, they are not orthonormal since the norm is
.) We
already showed in an earlier example that these vectors are orthogonal. However, they are not orthonormal since the norm is
![]() in each case. Let's try projecting
in each case. Let's try projecting ![]() onto these vectors and
seeing if we can reconstruct by summing the projections.
onto these vectors and
seeing if we can reconstruct by summing the projections.
The projection of ![]() onto
onto ![]() is, by
definition,5.12
is, by
definition,5.12
Similarly, the projection of ![]() onto
onto ![]() is
is
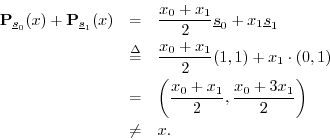
The sum of these projections is then
![\begin{eqnarray*}
{\bf P}_{\sv_0}(x) + {\bf P}_{\sv_1}(x) &=&
\frac{x_0 + x_1}...
...} - \frac{x_0 - x_1}{2}\right) \\ [5pt]
&=& (x_0,x_1) \isdef x.
\end{eqnarray*}](http://www.dsprelated.com/josimages_new/mdft/img915.png)
It worked!
Projection onto Linearly Dependent Vectors
Now consider another example:
![\begin{eqnarray*}
\sv_0 &\isdef & [1,1], \\
\sv_1 &\isdef & [-1,-1].
\end{eqnarray*}](http://www.dsprelated.com/josimages_new/mdft/img916.png)
The projections of
![]() onto these vectors are
onto these vectors are
The sum of the projections is
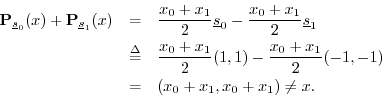
Something went wrong, but what? It turns out that a set of ![]() vectors can be used to reconstruct an arbitrary vector in
vectors can be used to reconstruct an arbitrary vector in ![]() from
its projections only if they are linearly independent. In
general, a set of vectors is linearly independent if none of them can
be expressed as a linear combination of the others in the set. What
this means intuitively is that they must ``point in different
directions'' in
from
its projections only if they are linearly independent. In
general, a set of vectors is linearly independent if none of them can
be expressed as a linear combination of the others in the set. What
this means intuitively is that they must ``point in different
directions'' in ![]() -space. In this example
-space. In this example
![]() so that they
lie along the same line in
so that they
lie along the same line in ![]() -space. As a result, they are
linearly dependent: one is a linear combination of the other
(
-space. As a result, they are
linearly dependent: one is a linear combination of the other
(
![]() ).
).
Projection onto Non-Orthogonal Vectors
Consider this example:
![\begin{eqnarray*}
\sv_0 &\isdef & [1,1] \\
\sv_1 &\isdef & [0,1]
\end{eqnarray*}](http://www.dsprelated.com/josimages_new/mdft/img922.png)
These point in different directions, but they are not orthogonal. What happens now? The projections are
The sum of the projections is
So, even though the vectors are linearly independent, the sum of
projections onto them does not reconstruct the original vector. Since the
sum of projections worked in the orthogonal case, and since orthogonality
implies linear independence, we might conjecture at this point that the sum
of projections onto a set of ![]() vectors will reconstruct the original
vector only when the vector set is orthogonal, and this is true,
as we will show.
vectors will reconstruct the original
vector only when the vector set is orthogonal, and this is true,
as we will show.
It turns out that one can apply an orthogonalizing process, called
Gram-Schmidt orthogonalization to any ![]() linearly independent
vectors in
linearly independent
vectors in ![]() so as to form an orthogonal set which will always
work. This will be derived in Section 5.10.4.
so as to form an orthogonal set which will always
work. This will be derived in Section 5.10.4.
Obviously, there must be at least ![]() vectors in the set. Otherwise,
there would be too few degrees of freedom to represent an
arbitrary
vectors in the set. Otherwise,
there would be too few degrees of freedom to represent an
arbitrary
![]() . That is, given the
. That is, given the ![]() coordinates
coordinates
![]() of
of ![]() (which are scale factors relative to
the coordinate vectors
(which are scale factors relative to
the coordinate vectors
![]() in
in ![]() ), we have to find at least
), we have to find at least ![]() coefficients of projection (which we may think of as coordinates
relative to new coordinate vectors
coefficients of projection (which we may think of as coordinates
relative to new coordinate vectors ![]() ). If we compute only
). If we compute only ![]() coefficients, then we would be mapping a set of
coefficients, then we would be mapping a set of ![]() complex numbers to
complex numbers to
![]() numbers. Such a mapping cannot be invertible in general. It
also turns out
numbers. Such a mapping cannot be invertible in general. It
also turns out ![]() linearly independent vectors is always sufficient.
The next section will summarize the general results along these lines.
linearly independent vectors is always sufficient.
The next section will summarize the general results along these lines.
General Conditions
This section summarizes and extends the above derivations in a more
formal manner (following portions of chapter 4 of
![]() ). In
particular, we establish that the sum of projections of
). In
particular, we establish that the sum of projections of
![]() onto
onto ![]() vectors
vectors
![]() will give back the original vector
will give back the original vector
![]() whenever the set
whenever the set
![]() is an orthogonal
basis for
is an orthogonal
basis for ![]() .
.
Definition: A set of vectors is said to form a vector space if, given
any two members ![]() and
and ![]() from the set, the vectors
from the set, the vectors
![]() and
and ![]() are also in the set, where
are also in the set, where
![]() is any
scalar.
is any
scalar.
Definition: The set of all ![]() -dimensional complex vectors is denoted
-dimensional complex vectors is denoted
![]() . That is,
. That is, ![]() consists of all vectors
consists of all vectors
![]() defined as a list of
defined as a list of ![]() complex numbers
complex numbers
![]() .
.
Theorem: ![]() is a vector space under elementwise addition and
multiplication by complex scalars.
is a vector space under elementwise addition and
multiplication by complex scalars.
Proof: This is a special case of the following more general theorem.
Theorem: Let ![]() be an integer greater than 0. Then the set of all
linear combinations of
be an integer greater than 0. Then the set of all
linear combinations of ![]() vectors from
vectors from ![]() forms a vector space
under elementwise addition and multiplication by complex scalars.
forms a vector space
under elementwise addition and multiplication by complex scalars.
Proof: Let the original set of ![]() vectors be denoted
vectors be denoted
![]() .
Form
.
Form

which is yet another linear combination of the original vectors (since
complex numbers are closed under addition). Since we have shown that
scalar multiples and vector sums of linear combinations of the original
![]() vectors from
vectors from ![]() are also linear combinations of those same
original
are also linear combinations of those same
original ![]() vectors from
vectors from ![]() , we have that the defining properties
of a vector space are satisfied.
, we have that the defining properties
of a vector space are satisfied.
![]()
Note that the closure of vector addition and scalar multiplication are ``inherited'' from the closure of complex numbers under addition and multiplication.
Corollary: The set of all linear combinations of ![]() real vectors
real vectors
![]() , using real scalars
, using real scalars
![]() , form a
vector space.
, form a
vector space.
Definition: The set of all linear combinations of a set of ![]() complex vectors from
complex vectors from ![]() , using complex scalars, is called a
complex vector space of dimension
, using complex scalars, is called a
complex vector space of dimension ![]() .
.
Definition: The set of all linear combinations of a set of ![]() real vectors
from
real vectors
from ![]() , using real scalars, is called a real vector
space of dimension
, using real scalars, is called a real vector
space of dimension ![]() .
.
Definition: If a vector space consists of the set of all linear
combinations of a finite set of vectors
![]() , then
those vectors are said to span the space.
, then
those vectors are said to span the space.
Example: The coordinate vectors in ![]() span
span ![]() since every vector
since every vector
![]() can be expressed as a linear combination of the coordinate vectors
as
can be expressed as a linear combination of the coordinate vectors
as
Definition: The vector space spanned by a set of ![]() vectors from
vectors from ![]() is called an
is called an ![]() -dimensional subspace of
-dimensional subspace of ![]() .
.
Definition: A vector
![]() is said to be linearly dependent on
a set of
is said to be linearly dependent on
a set of ![]() vectors
vectors
![]() ,
,
![]() , if
, if
![]() can be expressed as a linear combination of those
can be expressed as a linear combination of those ![]() vectors.
vectors.
Thus,
![]() is linearly dependent on
is linearly dependent on
![]() if there
exist scalars
if there
exist scalars
![]() such that
such that
![]() . Note that the zero vector
is linearly dependent on every collection of vectors.
. Note that the zero vector
is linearly dependent on every collection of vectors.
Theorem: (i) If
![]() span a vector space, and if one of them,
say
span a vector space, and if one of them,
say ![]() , is linearly dependent on the others, then the same vector
space is spanned by the set obtained by omitting
, is linearly dependent on the others, then the same vector
space is spanned by the set obtained by omitting ![]() from the
original set. (ii) If
from the
original set. (ii) If
![]() span a vector space,
we can always select from these a linearly independent set that spans
the same space.
span a vector space,
we can always select from these a linearly independent set that spans
the same space.
Proof: Any ![]() in the space can be represented as a linear combination of the
vectors
in the space can be represented as a linear combination of the
vectors
![]() . By expressing
. By expressing ![]() as a linear
combination of the other vectors in the set, the linear combination
for
as a linear
combination of the other vectors in the set, the linear combination
for ![]() becomes a linear combination of vectors other than
becomes a linear combination of vectors other than ![]() .
Thus,
.
Thus, ![]() can be eliminated from the set, proving (i). To prove
(ii), we can define a procedure for forming the required subset of the
original vectors: First, assign
can be eliminated from the set, proving (i). To prove
(ii), we can define a procedure for forming the required subset of the
original vectors: First, assign ![]() to the set. Next, check to
see if
to the set. Next, check to
see if ![]() and
and ![]() are linearly dependent. If so (i.e.,
are linearly dependent. If so (i.e.,
![]() is a scalar times
is a scalar times ![]() ), then discard
), then discard ![]() ; otherwise
assign it also to the new set. Next, check to see if
; otherwise
assign it also to the new set. Next, check to see if ![]() is
linearly dependent on the vectors in the new set. If it is (i.e.,
is
linearly dependent on the vectors in the new set. If it is (i.e.,
![]() is some linear combination of
is some linear combination of ![]() and
and ![]() ) then
discard it; otherwise assign it also to the new set. When this
procedure terminates after processing
) then
discard it; otherwise assign it also to the new set. When this
procedure terminates after processing ![]() , the new set will
contain only linearly independent vectors which span the original
space.
, the new set will
contain only linearly independent vectors which span the original
space.
Definition: A set of linearly independent vectors which spans a vector space
is called a basis for that vector space.
Definition: The set of coordinate vectors in ![]() is called the natural basis for
is called the natural basis for ![]() , where the
, where the ![]() th basis vector
is
th basis vector
is
![$\displaystyle \underline{e}_n = [\;0\;\;\cdots\;\;0\;\underbrace{1}_{\mbox{$n$th}}\;\;0\;\;\cdots\;\;0].
$](http://www.dsprelated.com/josimages_new/mdft/img955.png)
Theorem: The linear combination expressing a vector in terms of basis vectors
for a vector space is unique.
Proof: Suppose a vector
![]() can be expressed in two different ways as
a linear combination of basis vectors
can be expressed in two different ways as
a linear combination of basis vectors
![]() :
:
where
![]() for at least one value of
for at least one value of
![]() .
Subtracting the two representations gives
.
Subtracting the two representations gives
Note that while the linear combination relative to a particular basis is
unique, the choice of basis vectors is not. For example, given any basis
set in ![]() , a new basis can be formed by rotating all vectors in
, a new basis can be formed by rotating all vectors in
![]() by the same angle. In this way, an infinite number of basis sets can
be generated.
by the same angle. In this way, an infinite number of basis sets can
be generated.
As we will soon show, the DFT can be viewed as a change of
coordinates from coordinates relative to the natural basis in ![]() ,
,
![]() , to coordinates relative to the sinusoidal
basis for
, to coordinates relative to the sinusoidal
basis for ![]() ,
,
![]() , where
, where
![]() . The sinusoidal basis set for
. The sinusoidal basis set for ![]() consists of length
consists of length
![]() sampled complex sinusoids at frequencies
sampled complex sinusoids at frequencies
![]() . Any scaling of these vectors in
. Any scaling of these vectors in ![]() by complex
scale factors could also be chosen as the sinusoidal basis (i.e., any
nonzero amplitude and any phase will do). However, for simplicity, we will
only use unit-amplitude, zero-phase complex sinusoids as the Fourier
``frequency-domain'' basis set. To summarize this paragraph, the
time-domain samples of a signal are its coordinates relative to the natural
basis for
by complex
scale factors could also be chosen as the sinusoidal basis (i.e., any
nonzero amplitude and any phase will do). However, for simplicity, we will
only use unit-amplitude, zero-phase complex sinusoids as the Fourier
``frequency-domain'' basis set. To summarize this paragraph, the
time-domain samples of a signal are its coordinates relative to the natural
basis for ![]() , while its spectral coefficients are the coordinates of the
signal relative to the sinusoidal basis for
, while its spectral coefficients are the coordinates of the
signal relative to the sinusoidal basis for ![]() .
.
Theorem: Any two bases of a vector space contain the same number of vectors.
Proof: Left as an exercise (or see [47]).
Definition: The number of vectors in a basis for a particular space is called
the dimension of the space. If the dimension is ![]() , the space is
said to be an
, the space is
said to be an ![]() dimensional space, or
dimensional space, or ![]() -space.
-space.
In this book, we will only consider finite-dimensional vector spaces in any detail. However, the discrete-time Fourier transform (DTFT) and Fourier transform (FT) both require infinite-dimensional basis sets, because there is an infinite number of points in both the time and frequency domains. (See Appendix B for details regarding the FT and DTFT.)
Signal/Vector Reconstruction from Projections
We now arrive finally at the main desired result for this section:
Theorem: The projections of any vector
![]() onto any orthogonal basis set
for
onto any orthogonal basis set
for ![]() can be summed to reconstruct
can be summed to reconstruct ![]() exactly.
exactly.
Proof: Let
![]() denote any orthogonal basis set for
denote any orthogonal basis set for ![]() .
Then since
.
Then since ![]() is in the space spanned by these vectors, we have
is in the space spanned by these vectors, we have
for some (unique) scalars
![$\displaystyle {\bf P}_{\sv_k}(\sv_l) \isdef
\frac{\left<\sv_l,\sv_k\right>}{\l...
...ll}
\underline{0}, & l\neq k \\ [5pt]
\sv_k, & l=k. \\
\end{array} \right.
$](http://www.dsprelated.com/josimages_new/mdft/img973.png)
Gram-Schmidt Orthogonalization
Recall from the end of §5.10 above that an
orthonormal set of vectors is a set of unit-length
vectors that are mutually orthogonal. In other words,
orthonormal vector set is just an orthogonal vector set in which each
vector ![]() has been normalized to unit length
has been normalized to unit length
![]() .
.
Theorem: Given a set of ![]() linearly independent vectors
linearly independent vectors
![]() from
from ![]() , we can construct an
orthonormal set
, we can construct an
orthonormal set
![]() which are linear
combinations of the original set and which span the same space.
which are linear
combinations of the original set and which span the same space.
Proof: We prove the theorem by constructing the desired orthonormal
set
![]() sequentially from the original set
sequentially from the original set ![]() .
This procedure is known as Gram-Schmidt orthogonalization.
.
This procedure is known as Gram-Schmidt orthogonalization.
First, note that
![]() for all
for all ![]() , since
, since
![]() is
linearly dependent on every vector. Therefore,
is
linearly dependent on every vector. Therefore,
![]() .
.
- Set
 .
.
- Define
 as
as  minus the projection of
onto
minus the projection of
onto
 :
The vector
:
The vector is orthogonal to
by construction. (We
subtracted out the part of that wasn't orthogonal to
.) Also, since and
is orthogonal to
by construction. (We
subtracted out the part of that wasn't orthogonal to
.) Also, since and  are linearly independent,
we have
are linearly independent,
we have
 .
.
- Set
 (i.e., normalize the result
of the preceding step).
(i.e., normalize the result
of the preceding step).
- Define
 as
as  minus the projection of
onto
and
minus the projection of
onto
and
 :
:

- Normalize:
 .
.
- Continue this process until
 has been defined.
has been defined.
The Gram-Schmidt orthogonalization procedure will construct an
orthonormal basis from any set of ![]() linearly independent vectors.
Obviously, by skipping the normalization step, we could also form
simply an orthogonal basis. The key ingredient of this procedure is
that each new basis vector is obtained by subtracting out the
projection of the next linearly independent vector onto the vectors
accepted so far into the set. We may say that each new linearly
independent vector
linearly independent vectors.
Obviously, by skipping the normalization step, we could also form
simply an orthogonal basis. The key ingredient of this procedure is
that each new basis vector is obtained by subtracting out the
projection of the next linearly independent vector onto the vectors
accepted so far into the set. We may say that each new linearly
independent vector ![]() is projected onto the subspace
spanned by the vectors
is projected onto the subspace
spanned by the vectors
![]() , and any nonzero
projection in that subspace is subtracted out of
, and any nonzero
projection in that subspace is subtracted out of ![]() to make the
new vector orthogonal to the entire subspace. In other words, we
retain only that portion of each new vector
to make the
new vector orthogonal to the entire subspace. In other words, we
retain only that portion of each new vector ![]() which ``points
along'' a new dimension. The first direction is arbitrary and is
determined by whatever vector we choose first (
which ``points
along'' a new dimension. The first direction is arbitrary and is
determined by whatever vector we choose first (![]() here). The
next vector is forced to be orthogonal to the first. The second is
forced to be orthogonal to the first two (and thus to the 2D subspace
spanned by them), and so on.
here). The
next vector is forced to be orthogonal to the first. The second is
forced to be orthogonal to the first two (and thus to the 2D subspace
spanned by them), and so on.
This chapter can be considered an introduction to some important concepts of linear algebra. The student is invited to pursue further reading in any textbook on linear algebra, such as [47].5.13
Matlab/Octave examples related to this chapter appear in Appendix I.
Next Section:
Signal Projection Problems
Previous Section:
The Inner Product






