



Wave Equation in Higher Dimensions
The wave equation in 1D, 2D, or 3D may be written as
where, in 3D,

Plane Waves in Air
Figure B.9 shows a 2D ![]() cross-section of a snapshot (in time)
of the sinusoidal plane wave
cross-section of a snapshot (in time)
of the sinusoidal plane wave
![\includegraphics[width=\twidth]{eps/planewave}](http://www.dsprelated.com/josimages_new/pasp/img3149.png) |
Figure B.10 depicts a more mathematical schematic of a sinusoidal plane wave traveling toward the upper-right of the figure. The dotted lines indicate the crests (peak amplitude location) along the wave.
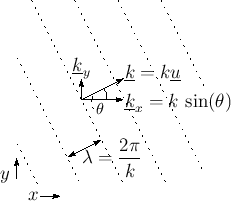
The direction of travel and spatial frequency are indicated by the
vector wavenumber
![]() , as discussed in in the following section.
, as discussed in in the following section.
Vector Wavenumber
Mathematically, a sinusoidal plane wave, as in Fig.B.9 or Fig.B.10, can be written as
where p(t,x) is the pressure at time
![$\displaystyle \underline{k}\eqsp \left[\begin{array}{c} k_x \\ [2pt] k_y \\ [2p...
... \cos{\beta} \\ [2pt] \cos{\gamma}\end{array}\right] \isdefs k\,\underline{u},
$](http://www.dsprelated.com/josimages_new/pasp/img3153.png)
-
 (unit) vector of direction cosines
(unit) vector of direction cosines
-
 (scalar) wavenumber along travel
direction
(scalar) wavenumber along travel
direction
- wavenumber along the travel direction in its magnitude

- travel direction in its orientation

To see that the vector wavenumber
![]() has the claimed
properties, consider that the orthogonal projection of any
vector
has the claimed
properties, consider that the orthogonal projection of any
vector
![]() onto a vector collinear with
onto a vector collinear with
![]() is given by
is given by
![]() [451].B.35Thus,
[451].B.35Thus,
![]() is the component of
is the component of
![]() lying along the
direction of wave propagation indicated by
lying along the
direction of wave propagation indicated by
![]() . The norm of this
component is
. The norm of this
component is
![]() , since
, since
![]() is
unit-norm by construction. More generally,
is
unit-norm by construction. More generally,
![]() is the
signed length (in meters) of the component of
is the
signed length (in meters) of the component of
![]() along
along
![]() .
This length times wavenumber
.
This length times wavenumber ![]() gives the spatial phase advance along
the wave, or,
gives the spatial phase advance along
the wave, or,
![]() .
.
For another point of view, consider the plane wave
![]() ,
which is the varying portion of the general plane-wave of
Eq.
,
which is the varying portion of the general plane-wave of
Eq.![]() (B.48) at time
(B.48) at time ![]() , with unit amplitude
, with unit amplitude ![]() and zero phase
and zero phase
![]() . The spatial phase of this plane wave is given by
. The spatial phase of this plane wave is given by
As we know from elementary vector calculus, the direction of maximum
phase advance is given by the gradient of the phase
![]() :
:
![$\displaystyle \underline{\nabla }\theta(\underline{x}) \isdefs
\left[\begin{ar...
...rray}{c} k_x \\ [2pt] k_y \\ [2pt] k_z\end{array}\right] \isdefs \underline{k}
$](http://www.dsprelated.com/josimages_new/pasp/img3172.png)
Since the wavenumber ![]() is the spatial frequency (in radians per
meter) along the direction of travel, we should be able to compute it
as the directional derivative of
is the spatial frequency (in radians per
meter) along the direction of travel, we should be able to compute it
as the directional derivative of
![]() along
along
![]() ,
i.e.,
,
i.e.,

Scattering of plane waves is discussed in §C.8.1.
Solving the 2D Wave Equation
Since solving the wave equation in 2D has all the essential features of the 3D case, we will look at the 2D case in this section.
Specializing Eq.![]() (B.47) to 2D, the 2D wave equation may
be written as
(B.47) to 2D, the 2D wave equation may
be written as
The 2D wave equation is obeyed by traveling sinusoidal plane
waves having any amplitude ![]() , radian frequency
, radian frequency ![]() , phase
, phase
![]() , and direction
, and direction
![]() :
:
The sum of two such waves traveling in opposite directions with the
same amplitude and frequency produces a standing wave. For example,
if the waves are traveling parallel to the ![]() axis, we have
axis, we have
which is a standing wave along
2D Boundary Conditions
We often wish to find solutions of the 2D wave equation that obey
certain known boundary conditions. An example is transverse
waves on an ideal elastic membrane, rigidly clamped on its boundary to
form a rectangle with dimensions ![]() meters.
meters.
Similar to the derivation of Eq.![]() (B.49), we can subtract
the second sinusoidal traveling wave from the first to yield
(B.49), we can subtract
the second sinusoidal traveling wave from the first to yield
Note that we can also use products of horizontal and vertical standing waves
To build solutions to the wave equation that obey all of the boundary conditions, we can form linear combinations of the above standing-wave products having zero displacement (``nodes'') along all four boundary lines:

where
The Wikipedia page (as of 1/31/10) on the Helmholtz equation provides a nice ``entry point'' on the above topics and further information.
3D Sound
The mathematics of 3D sound is quite elementary, as we will see below. The hard part of the theory of practical systems typically lies in the mathematical approximation to the ideal case. Examples include Ambisonics [158] and wave field synthesis [49].
Consider a point source at position
![]() . Then the
acoustic complex amplitude at position
. Then the
acoustic complex amplitude at position
![]() is given by
is given by
The fundamental approximation problem in 3D sound is to approximate
the complex acoustic field at one or more listening points using a
finite set of ![]() loudspeakers, which are often modeled as a point
source for each speaker.
loudspeakers, which are often modeled as a point
source for each speaker.
Next Section:
The Ideal Vibrating String
Previous Section:
Properties of Gases






