



Properties of Passive Impedances
It is well known that a real impedance ![]() (in Ohms, for example) is
passive so long as
(in Ohms, for example) is
passive so long as ![]() . A passive impedance cannot
create energy. On the other hand, if
. A passive impedance cannot
create energy. On the other hand, if ![]() , the impedance is
active and has some energy source. The concept of
passivity can be extended to complex frequency-dependent impedances
, the impedance is
active and has some energy source. The concept of
passivity can be extended to complex frequency-dependent impedances
![]() as well: A complex impedance
as well: A complex impedance
![]() is
passive if
is
passive if ![]() is positive real, where
is positive real, where ![]() is the
Laplace-transform variable. The positive-real property is discussed in
§C.11.2 below.
is the
Laplace-transform variable. The positive-real property is discussed in
§C.11.2 below.
This section explores some implications of the positive real condition for passive impedances. Specifically, §C.11.1 considers the nature of waves reflecting from a passive impedance in general, looking at the reflection transfer function, or reflectance, of a passive impedance. To provide further details, Section C.11.2 derives some mathematical properties of positive real functions, particularly for the discrete-time case. Application examples appear in §9.2.1 and §9.2.1.
Passive Reflectances
From Eq.![]() (C.75),
we have that the reflectance seen at a continuous-time impedance
(C.75),
we have that the reflectance seen at a continuous-time impedance
![]() is given for force waves by
is given for force waves by
where
In particular,
If the impedance ![]() goes to infinity (becomes rigid), then
goes to infinity (becomes rigid), then
![]() approaches
approaches ![]() , a result which agrees with an analysis of
rigid string terminations (p.
, a result which agrees with an analysis of
rigid string terminations (p. ![]() ). Similarly, when the
impedance goes to zero,
). Similarly, when the
impedance goes to zero,
![]() becomes
becomes ![]() , which agrees with
the physics of a string with a free end. In acoustic stringed
instruments, bridges are typically quite rigid, so that
, which agrees with
the physics of a string with a free end. In acoustic stringed
instruments, bridges are typically quite rigid, so that
![]() for all
for all ![]() . If a body resonance is
strongly coupled through the bridge,
. If a body resonance is
strongly coupled through the bridge,
![]() can be
significantly smaller than 1 at the resonant frequency
can be
significantly smaller than 1 at the resonant frequency ![]() .
.
Solving for ![]() in Eq.
in Eq.![]() (C.77), we can characterize every
impedance in terms of its reflectance:
(C.77), we can characterize every
impedance in terms of its reflectance:
In the discrete-time case, which may be related to the continuous-time
case by the bilinear transform (§7.3.2), we have the same basic
relations, but in the ![]() plane:
plane:


where
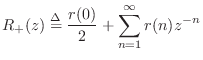
Mathematically, any stable transfer function having these properties may be called a Schur function. Thus, the discrete-time reflectance
Note that Eq.![]() (C.79) may be obtained from the general formula for
scattering at a loaded waveguide junction for the case of a single
waveguide (
(C.79) may be obtained from the general formula for
scattering at a loaded waveguide junction for the case of a single
waveguide (![]() ) terminated by a lumped load (§C.12).
) terminated by a lumped load (§C.12).
In the limit as damping goes to zero (all poles of ![]() converge to
the unit circle),
the reflectance
converge to
the unit circle),
the reflectance
![]() becomes a digital allpass filter. Similarly,
becomes a digital allpass filter. Similarly,
![]() becomes a continuous-time allpass filter as the poles of
becomes a continuous-time allpass filter as the poles of
![]() approach the
approach the ![]() axis.
axis.
Recalling that a lossless impedance is called a reactance
(§7.1), we can say that every reactance gives rise to an
allpass reflectance. Thus, for example, waves reflecting off a
mass at the end of a vibrating string will be allpass filtered,
because the driving-point impedance of a mass (![]() ) is a pure
reactance. In particular, the force-wave reflectance of a mass
) is a pure
reactance. In particular, the force-wave reflectance of a mass ![]() terminating an ideal string having wave impedance
terminating an ideal string having wave impedance ![]() is
is
![]() , which is a continuous-time allpass filter having
a pole at
, which is a continuous-time allpass filter having
a pole at ![]() and a zero at
and a zero at ![]() .
.
It is intuitively reasonable that a passive reflection gain cannot
exceed ![]() at any frequency (i.e., the reflectance is a Schur filter,
as defined in Eq.
at any frequency (i.e., the reflectance is a Schur filter,
as defined in Eq.![]() (C.79)). It is also reasonable that lossless
reflection would have a gain of 1 (i.e., it is allpass).
(C.79)). It is also reasonable that lossless
reflection would have a gain of 1 (i.e., it is allpass).
Note that reflection filters always have an equal number of poles and
zeros, as can be seen from Eq.![]() (C.76) above. This property is
preserved by the bilinear transform, so it holds in both the
continuous- and discrete-time cases.
(C.76) above. This property is
preserved by the bilinear transform, so it holds in both the
continuous- and discrete-time cases.
Reflectance and Transmittance of a Yielding String Termination
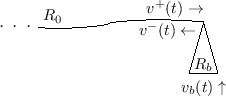
Consider the special case of a reflection and transmission at a
yielding termination, or ``bridge'', of an ideal vibrating
string on its right end, as shown in Fig.C.28. Denote the
incident and reflected velocity waves by ![]() and
and ![]() ,
respectively, and similarly denote the force-wave components by
,
respectively, and similarly denote the force-wave components by
![]() and
and
![]() . Finally, denote the velocity of the
termination itself by
. Finally, denote the velocity of the
termination itself by
![]() , and its force-wave
reflectance by
, and its force-wave
reflectance by

The bridge velocity is given by

![$\displaystyle \hat{\tau}_f(s) \isdefs \frac{F_b(s)}{F^{+}(s)}
\eqsp \frac{R_0[V^{+}(s)-V^{-}(s)]}{R_0V^{+}(s)}
\eqsp 1+\hat{\rho}_f(s)
$](http://www.dsprelated.com/josimages_new/pasp/img3757.png)
Power-Complementary Reflection and Transmission
We can show that the reflectance and transmittance of the yielding termination are power complementary. That is, the reflected and transmitted signal-power sum to yield the incident signal-power.
The average power incident at the bridge at frequency ![]() can be
expressed in the frequency domain as
can be
expressed in the frequency domain as
![]() .
The reflected power is then
.
The reflected power is then
![]() . Removing the minus sign, which can be
associated with reversed direction of travel, we obtain that the
power reflection frequency response is
. Removing the minus sign, which can be
associated with reversed direction of travel, we obtain that the
power reflection frequency response is
![]() , which
generalizes by analytic continuation to
, which
generalizes by analytic continuation to
![]() . The power
transmittance is given by
. The power
transmittance is given by
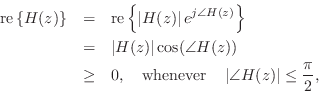
Positive Real Functions
Any passive driving-point impedance, such as the impedance of a
violin bridge, is positive real. Positive real functions have
been studied extensively in the continuous-time case in the context of
network synthesis [68,524]. Very little, however, seems
to be available in the discrete time case. This section (reprinted
from [428]) summarizes the main properties of positive real
function in the ![]() plane (i.e., the discrete-time case).
plane (i.e., the discrete-time case).
Definition.
A complex valued function of a complex variable ![]() is said to be
positive real (PR) if
is said to be
positive real (PR) if
We now specialize to the subset of functions ![]() representable as a
ratio of finite-order polynomials in
representable as a
ratio of finite-order polynomials in ![]() . This class of ``rational''
functions is the set of all transfer functions of finite-order
time-invariant linear systems, and we write
. This class of ``rational''
functions is the set of all transfer functions of finite-order
time-invariant linear systems, and we write ![]() to denote a member
of this class. We use the convention that stable, minimum phase
systems are analytic and nonzero in the strict outer
disk.C.8 Condition (1) implies
that for
to denote a member
of this class. We use the convention that stable, minimum phase
systems are analytic and nonzero in the strict outer
disk.C.8 Condition (1) implies
that for ![]() to be PR, the polynomial coefficients must be real,
and therefore complex poles and zeros must exist in conjugate
pairs. We assume from this point on that
to be PR, the polynomial coefficients must be real,
and therefore complex poles and zeros must exist in conjugate
pairs. We assume from this point on that
![]() satisfies (1).
From (2) we derive the facts below.
satisfies (1).
From (2) we derive the facts below.
Property 1. A real rational function ![]() is PR iff
is PR iff
![]() .
.
Proof. Expressing ![]() in polar form gives
in polar form gives
since the zeros of ![]() are isolated.
are isolated.
![]()
Property 2. ![]() is PR iff
is PR iff ![]() is PR.
is PR.
Proof. Assuming ![]() is PR, we have by Property 1,
is PR, we have by Property 1,
Property 3. A PR function ![]() is analytic and nonzero in
the strict outer disk.
is analytic and nonzero in
the strict outer disk.
Proof. (By contradiction)
Without loss of generality, we treat only ![]() order polynomials
order polynomials
The general (normalized) causal, finite-order, linear,
time-invariant transfer function may be written


where
Suppose there is a pole of multiplicity ![]() outside the unit circle.
Without loss of generality, we may set
outside the unit circle.
Without loss of generality, we may set ![]() , and
, and
![]() with
with ![]() . Then for
. Then for ![]() near
near ![]() , we have
, we have

Consider the circular neighborhood of radius ![]() described by
described by
![]() . Since
. Since ![]() we may
choose
we may
choose
![]() so that all points
so that all points ![]() in this neighborhood lie
outside the unit circle. If we write the residue of the factor
in this neighborhood lie
outside the unit circle. If we write the residue of the factor
![]() in polar form as
in polar form as
![]() , then we have,
for sufficiently small
, then we have,
for sufficiently small ![]() ,
,

Therefore, approaching the pole
Corollary. In equation Eq.![]() (C.80),
(C.80), ![]() .
.
Proof. If ![]() , then there are
, then there are ![]() poles at
infinity. As
poles at
infinity. As
![]() ,
,
![]() , we must have
, we must have ![]() .
.
![]()
Corollary. The log-magnitude of a PR function has zero mean on the unit circle.
This is a general property of stable, minimum-phase transfer functions which follows immediately from the argument principle [297,326].
Corollary. A rational PR function has an equal number of poles and zeros all of which are in the unit disk.
This really a convention for numbering poles and zeros. In Eq.![]() (C.80),
we have
(C.80),
we have ![]() , and all poles and zeros inside the unit disk. Now, if
, and all poles and zeros inside the unit disk. Now, if
![]() then we have
then we have ![]() extra poles at
extra poles at ![]() induced by the numerator.
If
induced by the numerator.
If ![]() , then
, then ![]() zeros at the origin appear from the denominator.
zeros at the origin appear from the denominator.
Corollary. Every pole on the unit circle of a positive real function must be simple with a real and positive residue.
Proof.
We repeat the previous argument using a semicircular neighborhood of
radius ![]() about the point
about the point
![]() to obtain
to obtain
In order to have
Corollary.
If ![]() is PR with a zero at
is PR with a zero at
![]() , then
, then
Proof. We may repeat the above for ![]() .
.
Property. Every PR function ![]() has a causal inverse z transform
has a causal inverse z transform ![]() .
.
Proof. This follows immediately from analyticity in the outer disk
[342, pp. 30-36]
However, we may give a more concrete proof as follows.
Suppose ![]() is non-causal. Then there exists
is non-causal. Then there exists
![]() such that
such that
![]() .
We have,
.
We have,

Hence, ![]() has at least one pole at infinity and cannot be PR by Property 3.
Note that this pole at infinity cannot be cancelled since otherwise
has at least one pole at infinity and cannot be PR by Property 3.
Note that this pole at infinity cannot be cancelled since otherwise
which contradicts the hypothesis that ![]() is non-causal.
is non-causal.
![]()
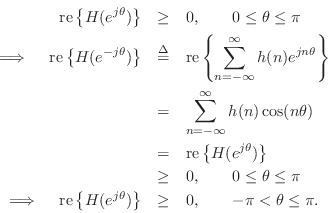
Property.
![]() is PR iff it is analytic for
is PR iff it is analytic for
![]() , poles on the
unit circle are simple with real and positive residues, and
re
, poles on the
unit circle are simple with real and positive residues, and
re![]() for
for
![]() .
.
Proof. If ![]() is positive real, the conditions stated hold by virtue
of Property 3 and the definition of positive real.
is positive real, the conditions stated hold by virtue
of Property 3 and the definition of positive real.
To prove the converse, we first show nonnegativity on the upper semicircle implies nonnegativity over the entire circle.
Alternatively, we might simply state that
![]() real implies
re
real implies
re![]() is even in
is even in ![]() .
.
Next, since the function ![]() is analytic everywhere except at
is analytic everywhere except at
![]() , it follows that
, it follows that
![]() is analytic wherever
is analytic wherever
![]() is finite. There are no poles of
is finite. There are no poles of ![]() outside the unit
circle due to the analyticity assumption, and poles on the unit circle
have real and positive residues. Referring again to the limiting form
Eq.
outside the unit
circle due to the analyticity assumption, and poles on the unit circle
have real and positive residues. Referring again to the limiting form
Eq.![]() (C.81) of
(C.81) of ![]() near a pole on the unit circle at
near a pole on the unit circle at ![]() ,
we see that, as
,
we see that, as
![]() , we have
, we have

since the residue
For example, if a transfer function is known to be asymptotically stable, then a frequency response with nonnegative real part implies that the transfer function is positive real.
Note that consideration of ![]() leads to analogous necessary and sufficient
conditions for
leads to analogous necessary and sufficient
conditions for ![]() to be positive real in terms of its
zeros instead of poles.
to be positive real in terms of its
zeros instead of poles.
![]()
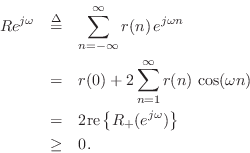
Relation to Stochastic Processes
Property.
If a stationary random process ![]() has a rational power spectral
density
has a rational power spectral
density
![]() corresponding to an autocorrelation function
corresponding to an autocorrelation function
![]() , then
, then
Proof.
By the representation theorem [19, pp. 98-103] there exists
an asymptotically stable filter
![]() which will produce a
realization of
which will produce a
realization of ![]() when driven by white noise, and we have
when driven by white noise, and we have
![]() . We define the analytic continuation
of
. We define the analytic continuation
of
![]() by
by
![]() . Decomposing
. Decomposing ![]() into a sum of
causal and anti-causal components gives
into a sum of
causal and anti-causal components gives

where ![]() is found by equating coefficients of like powers of
is found by equating coefficients of like powers of ![]() in
in
Since the poles of ![]() and
and ![]() are the same,
it only remains to be shown that
re
are the same,
it only remains to be shown that
re![]() .
.
Since spectral power is nonnegative,
![]() for all
for all ![]() , and so
, and so
![]()
Relation to Schur Functions
Definition. A Schur function ![]() is defined as a complex function analytic and of modulus not exceeding
unity in
is defined as a complex function analytic and of modulus not exceeding
unity in ![]() .
.
Property. The function
is a Schur function if and only if
Proof.
Suppose ![]() is positive real. Then for
is positive real. Then for ![]() ,
re
,
re![]() re
re![]() is PR. Consequently,
is PR. Consequently, ![]() is minimum phase which implies all roots of
is minimum phase which implies all roots of ![]() lie in the unit circle.
Thus
lie in the unit circle.
Thus ![]() is analytic in
is analytic in ![]() . Also,
. Also,
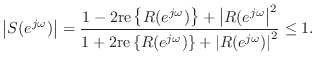
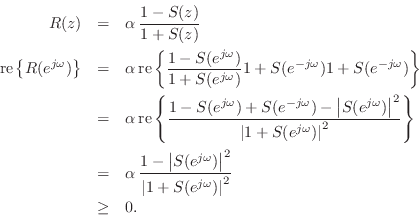
Conversely, suppose ![]() is Schur. Solving Eq.
is Schur. Solving Eq.![]() (C.84) for
(C.84) for ![]() and taking the real part on the unit circle yields
and taking the real part on the unit circle yields
If
![]() is constant, then
is constant, then
![]() is PR. If
is PR. If ![]() is not
constant, then by the maximum principle,
is not
constant, then by the maximum principle, ![]() for
for ![]() . By
Rouche's theorem applied on a circle of radius
. By
Rouche's theorem applied on a circle of radius
![]() ,
,
![]() , on
which
, on
which ![]() , the function
, the function ![]() has the same number of
zeros as the function
has the same number of
zeros as the function ![]() in
in
![]() . Hence,
. Hence, ![]() is
minimum phase which implies
is
minimum phase which implies ![]() is analytic for
is analytic for ![]() . Thus
. Thus
![]() is PR.
is PR.![]()
Relation to functions positive real in the right-half plane
Property.
re![]() for
for
![]() whenever
whenever
Proof.
We shall show that the change of variable
![]() ,
provides a conformal map from the z-plane to the s-plane that takes the
region
,
provides a conformal map from the z-plane to the s-plane that takes the
region
![]() to the region
re
to the region
re![]() . The general formula for a
bilinear conformal mapping of functions of a complex variable is given by
. The general formula for a
bilinear conformal mapping of functions of a complex variable is given by

In general, a bilinear transformation maps circles and lines into circles
and lines [83]. We see that the choice of three specific points
and their images determines the mapping for all ![]() and
and ![]() .
We must have that the imaginary axis in the s-plane maps to the unit circle
in the z-plane.
That is, we may determine the mapping by three points of the form
.
We must have that the imaginary axis in the s-plane maps to the unit circle
in the z-plane.
That is, we may determine the mapping by three points of the form
![]() and
and
![]() .
If we predispose one such mapping by choosing the pairs
.
If we predispose one such mapping by choosing the pairs
![]() and
and
![]() , then we are left with
transformations of the form
, then we are left with
transformations of the form

Letting

There is a bonus associated with the restriction that ![]() be real which
is that
be real which
is that
We have therefore proven
Property.
 PR
PR
The class of mappings of the form Eq.![]() (C.85) which take the exterior of
the unit circle to the right-half plane is larger than the class
Eq.
(C.85) which take the exterior of
the unit circle to the right-half plane is larger than the class
Eq.![]() (C.86). For example, we may precede the transformation
Eq.
(C.86). For example, we may precede the transformation
Eq.![]() (C.86) by any
conformal map which takes the unit disk to the unit disk, and these
mappings have the algebraic form of a first order complex allpass
whose zero lies inside the unit circle.
(C.86) by any
conformal map which takes the unit disk to the unit disk, and these
mappings have the algebraic form of a first order complex allpass
whose zero lies inside the unit circle.
where
Riemann's theorem may be used to show that Eq.
The bilinear transform is one which is used to map analog filters into
digital filters. Another such mapping is called the matched ![]() transform [362]. It also preserves the positive real
property.
transform [362]. It also preserves the positive real
property.
Property. ![]() is PR if
is PR if ![]() is positive real in the analog
sense, where
is positive real in the analog
sense, where ![]() is interpreted as the sampling period.
is interpreted as the sampling period.
Proof. The mapping
![]() takes the right-half
takes the right-half ![]() -plane to
the outer disk in the
-plane to
the outer disk in the ![]() -plane. Also
-plane. Also ![]() is real if
is real if ![]() is
real. Hence
is
real. Hence ![]() PR implies
PR implies ![]() PR. (Note, however, that
rational functions do not in general map to rational
functions.)
PR. (Note, however, that
rational functions do not in general map to rational
functions.)![]()
These transformations allow application of the large battery of tests which exist for functions positive real in the right-half plane [524].
Special cases and examples
- The sum of positive real functions is positive real.
- The difference of positive real functions is conditionally positive real.
- The product or division of positive real functions is conditionally PR.
 PR
PR
 not PR for
not PR for
 .
.
Minimum Phase (MP) polynomials in 
All properties of MP polynomials apply without modification to marginally stable allpole transfer functions (cf. Property 2):
- Every first-order MP polynomial is positive real.
- Every first-order MP polynomial
 is such that
is such that
 is positive real.
is positive real.
- A PR second-order MP polynomial with complex-conjugate zeros,

satisfies
If
 , then
re
, then
re has a double zero at
has a double zero at
- All polynomials of the form
are positive real. (These have zeros uniformly distributed on a circle of radius

 .)
.)
Miscellaneous Properties
- If all poles and zeros of a PR function are on the unit circle,
then they alternate along the circle. Since this property is
preserved by the bilinear transform, it is true in both the
 and planes. It can be viewed as a consequence of the
and planes. It can be viewed as a consequence of the
 phase bounds for positive-real functions.
phase bounds for positive-real functions.
- If
 is PR, then so is
is PR, then so is
 ,
where the prime denotes differentiation in .
,
where the prime denotes differentiation in .
Next Section:
Loaded Waveguide Junctions
Previous Section:
``Traveling Waves'' in Lumped Systems






