



Series and Parallel Filter Sections
In many situations it is better to implement a digital filter ![]() in terms of first- and/or second-order elementary sections,
either in series or in parallel. In particular, such an
implementation may have numerical advantages. In the time-varying
case, it is easier to control fundamental parameters of small
sections, such as pole frequencies, by means of coefficient
variations.
in terms of first- and/or second-order elementary sections,
either in series or in parallel. In particular, such an
implementation may have numerical advantages. In the time-varying
case, it is easier to control fundamental parameters of small
sections, such as pole frequencies, by means of coefficient
variations.
Series Second-Order Sections
For many filter types, such as lowpass, highpass, and bandpass filters, a good choice of implementation structure is often series second-order sections. In fixed-point applications, the ordering of the sections can be important.
The matlab function tf2sos10.5 converts from ``transfer function form'',
![]() , to series ``second-order-section'' form.
For example, the line
, to series ``second-order-section'' form.
For example, the line
BAMatrix = tf2sos(B,A);converts the real filter specified by polynomial vectors B and A to a series of second-order sections (biquads) specified by the rows of BAMatrix. Each row of BAMatrix is of the form
function [sos,g] = tf2sos(B,A) [z,p,g]=tf2zp(B(:)',A(:)'); % Direct form to (zeros,poles,gain) sos=zp2sos(z,p,g); % (z,p,g) to series second-order sections
Matlab Example
The following matlab example expands the filter
B=[1 0 0 0 0 1]; A=[1 0 0 0 0 .9]; [sos,g] = tf2sos(B,A) sos = 1.00000 0.61803 1.00000 1.00000 0.60515 0.95873 1.00000 -1.61803 1.00000 1.00000 -1.58430 0.95873 1.00000 1.00000 -0.00000 1.00000 0.97915 -0.00000 g = 1The g parameter is an input (or output) scale factor; for this filter, it was not needed. Thus, in this example we obtained the following filter factorization:
Note that the first two sections are second-order, while the third is first-order (when coefficients are rounded to five digits of precision after the decimal point).
In addition to tf2sos, tf2zp, and zp2sos discussed above, there are also functions sos2zp and sos2tf, which do the obvious conversion in both Matlab and Octave.10.6 The sos2tf function can be used to check that the second-order factorization is accurate:
% Numerically challenging "clustered roots" example:
[B,A] = zp2tf(ones(10,1),0.9*ones(10,1),1);
[sos,g] = tf2sos(B,A);
[Bh,Ah] = sos2tf(sos,g);
format long;
disp(sprintf('Relative L2 numerator error: %g',...
norm(Bh-B)/norm(B)));
% Relative L2 numerator error: 1.26558e-15
disp(sprintf('Relative L2 denominator error: %g',...
norm(Ah-A)/norm(A)));
% Relative L2 denominator error: 1.65594e-15
Thus, in this test, the original direct-form filter is compared with
one created from the second-order sections. Such checking should be
done for high-order filters, or filters having many poles and/or zeros
close together, because the polynomial factorization used to find the
poles and zeros can fail numerically. Moreover, the stability of the
factors should be checked individually.
Parallel First and/or Second-Order Sections
Instead of breaking up a filter into a series of second-order
sections, as discussed in the previous section, we can break the
filter up into a parallel sum of first and/or second-order
sections. Parallel sections are based directly on the partial
fraction expansion (PFE) of the filter transfer function discussed in
§6.8. As discussed in §6.8.3, there is additionally an
FIR part when the order of the transfer-function denominator
does not exceed that of the numerator (i.e., when the transfer function
is not strictly proper). The most general case of a PFE, valid
for any finite-order transfer function, was given by Eq.![]() (6.19),
repeated here for convenience:
(6.19),
repeated here for convenience:
where
The FIR part ![]() is typically realized as a tapped delay line, as
shown in Fig.5.5.
is typically realized as a tapped delay line, as
shown in Fig.5.5.
First-Order Complex Resonators
For distinct poles, the recursive terms in the complete partial
fraction expansion of Eq.![]() (9.2) can be realized as a parallel sum
of complex one-pole filter
sections, thereby producing a parallel complex resonator filter
bank. Complex resonators are efficient for processing complex input
signals, and they are especially easy to work with. Note that a
complex resonator bank is similarly obtained by implementing a
diagonalized state-space model [Eq.
(9.2) can be realized as a parallel sum
of complex one-pole filter
sections, thereby producing a parallel complex resonator filter
bank. Complex resonators are efficient for processing complex input
signals, and they are especially easy to work with. Note that a
complex resonator bank is similarly obtained by implementing a
diagonalized state-space model [Eq.![]() (G.22)].
(G.22)].
Real Second-Order Sections
In practice, however, signals are typically real-valued functions of
time. As a result, for real filters (§5.1),
it is typically more efficient computationally to combine
complex-conjugate one-pole sections together to form real second-order
sections (two poles and one zero each, in general). This process was
discussed in §6.8.1, and the resulting transfer function of
each second-order section becomes
where
When the two poles of a real second-order section are complex, they
form a complex-conjugate pair, i.e., they are located at
![]() in the
in the ![]() plane, where
plane, where ![]() is the modulus of either
pole, and
is the modulus of either
pole, and ![]() is the angle of either pole. In this case, the
``resonance-tuning coefficient'' in Eq.
is the angle of either pole. In this case, the
``resonance-tuning coefficient'' in Eq.![]() (9.3) can be expressed as
(9.3) can be expressed as
Figures 3.25 and 3.26 (p. ![]() ) illustrate filter realizations
consisting of one first-order and two second-order filter sections in
parallel.
) illustrate filter realizations
consisting of one first-order and two second-order filter sections in
parallel.
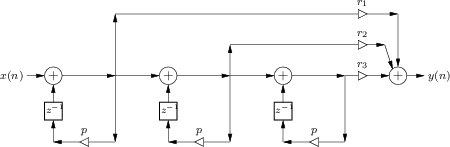
Implementation of Repeated Poles
Fig.9.5 illustrates an efficient implementation of terms due to a repeated pole with multiplicity three, contributing the additive terms
Formant Filtering Example
In speech synthesis [27,39], digital filters are often used to simulate formant filtering by the vocal tract. It is well known [23] that the different vowel sounds of speech can be simulated by passing a ``buzz source'' through a only two or three formant filters. As a result, speech is fully intelligible through the telephone bandwidth (nominally only 200-3200 Hz).
A formant is a resonance in the voice spectrum. A
single formant may thus be modeled using one biquad
(second-order filter section). For example, in the vowel ![]() as in
``father,'' the first three formant center-frequencies have been
measured near 700, 1220, and 2600 Hz, with half-power
bandwidths10.7 130, 70, and 160 Hz [40].
as in
``father,'' the first three formant center-frequencies have been
measured near 700, 1220, and 2600 Hz, with half-power
bandwidths10.7 130, 70, and 160 Hz [40].
In principle, the formant filter sections are in series, as can be found by deriving the transfer function of an acoustic tube [48]. As a consequence, the vocal-tract transfer function is an all-pole filter (provided that the nasal tract is closed off or negligible). As a result, there is no need to specify gains for the formant resonators--only center-frequency and bandwidth are necessary to specify each formant, leaving only an overall scale factor unspecified in a cascade (series) formant filter bank.
Numerically, however, it makes more sense to implement disjoint resonances in parallel rather than in series.10.8 This is because when one formant filter is resonating, the others will be attenuating, so that to achieve a particular peak-gain at resonance, the resonating filter must overcome all combined attenuations as well as applying its own gain. In fixed-point arithmetic, this can result in large quantization-noise gains, especially for the last resonator in the chain. As a result of these considerations, our example will implement the formant sections in parallel. This means we must find the appropriate biquad numerators so that when added together, the overall transfer-function numerator is a constant. This will be accomplished using the partial fraction expansion (§6.8).10.9
The matlab below illustrates the construction of a parallel formant
filter bank for simulating the vowel ![]() . For completeness, it is
used to filter a bandlimited impulse train, in order to synthesize the
vowel sound.
. For completeness, it is
used to filter a bandlimited impulse train, in order to synthesize the
vowel sound.
F = [700, 1220, 2600]; % Formant frequencies (Hz) BW = [130, 70, 160]; % Formant bandwidths (Hz) fs = 8192; % Sampling rate (Hz) nsecs = length(F); R = exp(-pi*BW/fs); % Pole radii theta = 2*pi*F/fs; % Pole angles poles = R .* exp(j*theta); % Complex poles B = 1; A = real(poly([poles,conj(poles)])); % freqz(B,A); % View frequency response: % Convert to parallel complex one-poles (PFE): [r,p,f] = residuez(B,A); As = zeros(nsecs,3); Bs = zeros(nsecs,3); % complex-conjugate pairs are adjacent in r and p: for i=1:2:2*nsecs k = 1+(i-1)/2; Bs(k,:) = [r(i)+r(i+1), -(r(i)*p(i+1)+r(i+1)*p(i)), 0]; As(k,:) = [1, -(p(i)+p(i+1)), p(i)*p(i+1)]; end sos = [Bs,As]; % standard second-order-section form iperr = norm(imag(sos))/norm(sos); % make sure sos is ~real disp(sprintf('||imag(sos)||/||sos|| = %g',iperr)); % 1.6e-16 sos = real(sos) % and make it exactly real % Reconstruct original numerator and denominator as a check: [Bh,Ah] = psos2tf(sos); % parallel sos to transfer function % psos2tf appears in the matlab-utilities appendix disp(sprintf('||A-Ah|| = %g',norm(A-Ah))); % 5.77423e-15 % Bh has trailing epsilons, so we'll zero-pad B: disp(sprintf('||B-Bh|| = %g',... norm([B,zeros(1,length(Bh)-length(B))] - Bh))); % 1.25116e-15 % Plot overlay and sum of all three % resonator amplitude responses: nfft=512; H = zeros(nsecs+1,nfft); for i=1:nsecs [Hiw,w] = freqz(Bs(i,:),As(i,:)); H(1+i,:) = Hiw(:).'; end H(1,:) = sum(H(2:nsecs+1,:)); ttl = 'Amplitude Response'; xlab = 'Frequency (Hz)'; ylab = 'Magnitude (dB)'; sym = ''; lgnd = {'sum','sec 1','sec 2', 'sec 3'}; np=nfft/2; % Only plot for positive frequencies wp = w(1:np); Hp=H(:,1:np); figure(1); clf; myplot(wp,20*log10(abs(Hp)),sym,ttl,xlab,ylab,1,lgnd); disp('PAUSING'); pause; saveplot('../eps/lpcexovl.eps'); % Now synthesize the vowel [a]: nsamps = 256; f0 = 200; % Pitch in Hz w0T = 2*pi*f0/fs; % radians per sample nharm = floor((fs/2)/f0); % number of harmonics sig = zeros(1,nsamps); n = 0:(nsamps-1); % Synthesize bandlimited impulse train for i=1:nharm, sig = sig + cos(i*w0T*n); end; sig = sig/max(sig); speech = filter(1,A,sig); soundsc([sig,speech]); % hear buzz, then 'ah'
Notes:
- The sampling rate was chosen to
be
 Hz because that is the default Matlab sampling rate,
and because that is a typical value used for ``telephone quality''
speech synthesis.
Hz because that is the default Matlab sampling rate,
and because that is a typical value used for ``telephone quality''
speech synthesis.
- The psos2tf utility is listed in §J.7.
- The overlay of the amplitude responses are shown in Fig.9.6.
![\includegraphics[width=\twidth]{eps/lpcexovl}](http://www.dsprelated.com/josimages_new/filters/img1163.png)
Butterworth Lowpass Filter Example
This example illustrates the design of a 5th-order Butterworth lowpass filter, implementing it using second-order sections. Since all three sections contribute to the same passband and stopband, it is numerically advisable to choose a series second-order-section implementation, so that their passbands and stopbands will multiply together instead of add.
fc = 1000; % Cut-off frequency (Hz) fs = 8192; % Sampling rate (Hz) order = 5; % Filter order [B,A] = butter(order,2*fc/fs); % [0:pi] maps to [0:1] here [sos,g] = tf2sos(B,A) % sos = % 1.00000 2.00080 1.00080 1.00000 -0.92223 0.28087 % 1.00000 1.99791 0.99791 1.00000 -1.18573 0.64684 % 1.00000 1.00129 -0.00000 1.00000 -0.42504 0.00000 % % g = 0.0029714 % % Compute and display the amplitude response Bs = sos(:,1:3); % Section numerator polynomials As = sos(:,4:6); % Section denominator polynomials [nsec,temp] = size(sos); nsamps = 256; % Number of impulse-response samples % Note use of input scale-factor g here: x = g*[1,zeros(1,nsamps-1)]; % SCALED impulse signal for i=1:nsec x = filter(Bs(i,:),As(i,:),x); % Series sections end % %plot(x); % Plot impulse response to make sure % it has decayed to zero (numerically) % % Plot amplitude response % (in Octave - Matlab slightly different): figure(2); X=fft(x); % sampled frequency response f = [0:nsamps-1]*fs/nsamps; grid('on'); axis([0 fs/2 -100 5]); legend('off'); plot(f(1:nsamps/2),20*log10(X(1:nsamps/2)));The final plot appears in Fig.9.7. A Matlab function for frequency response plots is given in §J.4. (Of course, one can also use freqz in either Matlab or Octave, but that function uses subplots which are not easily printable in Octave.)
Note that the Matlab Signal Processing Toolbox has a function called sosfilt so that ``y=sosfilt(sos,x)'' will implement an array of second-order sections without having to unpack them first as in the example above.
![\includegraphics[width=0.8\twidth]{eps/buttlpex}](http://www.dsprelated.com/josimages_new/filters/img1164.png) |
Summary of Series/Parallel Filter Sections
In summary, we noted above the following general guidelines regarding series vs. parallel elementary-section implementations:
- Series sections are preferred when all sections contribute to the same passband, such as in a lowpass, highpass, bandpass, or bandstop filter.
- Parallel sections are usually preferred when the sections have disjoint passbands, such as a formant filter bank used in voice models. Another example would be the phase vocoder filter bank [21].
Next Section:
Pole-Zero Analysis Problems
Previous Section:
The Four Direct Forms






