




A Fast Real-Time Trapezoidal Rule Integrator
This article presents a computationally-efficient network for computing real?time discrete integration using the Trapezoidal Rule.
Third-Order Distortion of a Digitally-Modulated Signal
Analog designers are always harping about amplifier third-order distortion. Why? In this article, we'll look at why third-order distortion is important, and simulate a QAM signal with third order distortion.
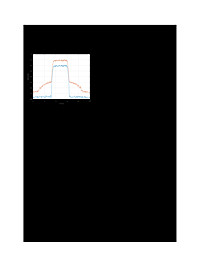
A Narrow Bandpass Filter in Octave or Matlab
The design of a very narrow bandpass FIR filter, coded in either Octave or Matlab, can prove challenging if a computationally-efficient filter is required. This is especially true if the sampling rate is high relative to the filter's center...
IIR Bandpass Filters Using Cascaded Biquads
In an earlier post [1], we implemented lowpass IIR filters using a cascade of second-order IIR filters, or biquads. This post provides a Matlab function to do the same for Butterworth bandpass IIR filters. Compared to conventional implementations, bandpass filters based on biquads are less sensitive to coefficient quantization [2]. This becomes important when designing narrowband filters.

Second Order Discrete-Time System Demonstration
Discrete-time systems are remarkable: the time response can be computed from mere difference equations, and the coefficients ai, bi of these equations are also the coefficients of H(z). Here, I try to illustrate this remarkableness by converting a continuous-time second-order system to an approximately equivalent discrete-time system. With a discrete-time model, we can then easily compute the time response to any input. But note that the goal here is as much to understand the discrete-time model as it is to find the response.
A Beginner's Guide To Cascaded Integrator-Comb (CIC) Filters
This article discusses the behavior, mathematics, and implementation of cascaded integrator-comb filters.
The correct answer to the quiz of @apolin
The correct answer to the @apolin quiz can be easily explained using the following Simulink model: In MATLAB you have to initialize the two filters: h = dftmtx (8); h1 = h (3, :); % The filter of the quiz h2 = h (7, :); % The...

A Free DSP Laboratory
Getting Started In Audio DSPImagine you're starting out studying DSP and your particular interest is audio. Wouldn't it be nice to have access to some audio signals and the tools to analyze and modify them? In the old days, a laboratory like this...
Polynomial calculations on an FIR filter engine, part 1
Polynomial evaluation is structurally akin to FIR filtering and fits dedicated filtering engines quite well, with certain caveats. It’s a technique that has wide applicability. This two-part note discusses transducer and amplifier non-linearity...

Plotting Discrete-Time Signals
A discrete-time sinusoid can have frequency up to just shy of half the sample frequency. But if you try to plot the sinusoid, the result is not always recognizable. For example, if you plot a 9 Hz sinusoid sampled at 100 Hz, you get the result shown in the top of Figure 1, which looks like a sine. But if you plot a 35 Hz sinusoid sampled at 100 Hz, you get the bottom graph, which does not look like a sine when you connect the dots. We typically want the plot of a sampled sinusoid to resemble its continuous-time version. To achieve this, we need to interpolate.

Setting Carrier to Noise Ratio in Simulations
When simulating digital receivers, we often want to check performance with added Gaussian noise. In this article, I’ll derive the simple equations for the rms noise level needed to produce a desired carrier to noise ratio (CNR or...
Update to a Narrow Bandpass Filter in Octave or Matlab
Following my earlier blog post (June 2020) featuring a Narrow Bandpass Filter, I’ve had some useful feedback and suggestions. This has inspired me to come up with an updated version, incorporating the following changes compared to the earlier...

ADC Clock Jitter Model, Part 2 – Random Jitter
In Part 1, I presented a Matlab function to model an ADC with jitter on the sample clock, and applied it to examples with deterministic jitter. Now we’ll investigate an ADC with random clock jitter, by using a filtered or unfiltered...

Find Aliased ADC or DAC Harmonics (with animation)
When a sinewave is applied to a data converter (ADC or DAC), device nonlinearities produce harmonics. If a harmonic frequency is greater than the Nyquist frequency, the harmonic appears as an alias. In this case, it is not at once...

Python scipy.signal IIR Filtering: An Example
Introduction In the last posts I reviewed how to use the Python scipy.signal package to design digital infinite impulse response (IIR) filters, specifically, using the iirdesign function (IIR design I and IIR design...

Stereophonic Amplitude-Panning: A Derivation of the "Tangent Law"
This article presents a derivation of the "Tangent Law"

Discrete-Time PLLs, Part 1: Basics
In this series of tutorials on discrete-time PLLs we will be focusing on Phase-Locked Loops that can be implemented in discrete-time signal proessors such as FPGAs, DSPs and of course, MATLAB.
DAC Zero-Order Hold Models
This article provides two simple time-domain models of a DAC’s zero-order hold. These models will allow us to find time and frequency domain approximations of DAC outputs, and simulate analog filtering of those outputs. Developing the models is also a good way to learn about the DAC ZOH function.

ADC Clock Jitter Model, Part 1 – Deterministic Jitter
Analog to digital converters (ADC’s) have several imperfections that affect communications signals, including thermal noise, differential nonlinearity, and sample clock jitter [1, 2]. As shown in Figure 1, the ADC has a sample/hold...
Simple Discrete-Time Modeling of Lossy LC Filters
There are many software applications that allow modeling LC filters in the frequency domain. But sometimes it is useful to have a time domain model, such as when you need to analyze a mixed analog and DSP system. For example, the...





